Табличный ПЛК.Табличное программирование контроллеров [Владимир Васильевич Стретенцев] (fb2) читать онлайн
- Табличный ПЛК.Табличное программирование контроллеров 2.96 Мб, 79с. скачать: (fb2) читать: (полностью) - (постранично) - Владимир Васильевич Стретенцев
[Настройки текста] [Cбросить фильтры]
[Оглавление]
Стретенцев Владимир Табличный ПЛК.Табличное программирование контроллеров
Предисловие
Управление объектами при помощи вычислительных устройств со временем трансформировалось из важного компонента в основную задачу при проектировании различных систем и оборудования. Современные микропроцессоры и контроллеры на их основе помогают реализовать алгоритмы управления как отдельными частями оборудования, так и всей системой, учитывая сложные внутренние связи. Увеличение скорости вычислений и объема памяти контроллеров способствовало созданию сложных программных комплексов, использованию многоуровневых интерфейсов обмена данными. Помимо большой положительной роли автоматического управления объектами в современной жизни, увеличение сложности систем стало причиной их ненадежности. Постепенно алгоритм работы вычислительного устройства, управляющего оборудованием или его частью, оказался недоступен как для оператора, так и для обслуживающих специалистов. Знания о работе системы стали сводиться к ожиданию определенной ответной реакции механизмов и различных приборов на изменения сигналов на входах контроллера. Оборудование, работающее по заданному алгоритму, начало наделяться интеллектуальными или разумными свойствами из-за часто непредсказуемой реакции на действия оператора. Работа системы в штатном режиме обычно не вызывает вопросов к ее внутреннему устройству. Но при поломке одной из частей системы или возникновении нештатной ситуации восстановление работоспособности системы потребует понимания алгоритма ее работы. И чем сложнее система, тем больше необходимо знать о взаимодействии между входящими в нее объектами. Большинство графических человеко-машинных интерфейсов в основном отражают состояние работающей системы и не позволяют во всей полноте обеспечить обслуживающий персонал информацией о ее повреждении или нештатном состоянии. Сложное программное обеспечение, часто недоступное в текстовом или графическом виде, может содержать ошибки или неучтенные состояния системы. В случае поломки какой-либо части системы восстановление ее работоспособности потребует от обслуживающих специалистов знания алгоритма управляющей программы и большого опыта в ремонте подобного оборудования. Для привлечения к программированию не только профессиональных программистов, но и инженеров других специальностей были разработаны языки программирования высокого уровня и графические средства разработки программ. Такие средства ускоряют разработку программ управления оборудованием, снижают количество ошибок в программном обеспечении, но при этом создают новые трудности при эксплуатации оборудования. Даже если не брать в расчет тот факт, что очень часто программный код, управляющий оборудованием, закрыт, специалистам, обслуживающим такое оборудование, необходимо постоянно изучать новые решения, появляющиеся в области программирования контроллеров, чтобы прогнозировать поведение оборудования при минимальном объеме информации о его внутренней организации. Таким образом, работа технических систем становится рискованной. Некоторые виды поломок могут серьезно увеличивать простой оборудования. Возникает зависимость живучести объекта от доступности специалистов и их квалификации. Даже у специалистов высокого уровня время выявления и последующего устранения причины неработоспособности оборудования постоянно возрастает. Насущным условием становится появление открытых систем, позволяющих получать информацию об их алгоритме работы и внутреннем состоянии. При этом возникают серьезные требования к графическому человеко-машинному интерфейсу. Требуется простая и понятная визуализация состояний системы. Настройка режимов работы не должна быть многослойной, когда для доступа к интересующим нас параметрам нужно проходить по ветвистому дереву переходов. Необходимо применять графические символы, создающие правильные ассоциации. При наведении указателя на элементы с изображением графических символов должна появляться подсказка, однозначно и ясно объясняющая назначение каждого символа. Причем это относится не только к интерфейсу пользователя, но и к графической системе, отражающей внутреннее состояние системы. Следует выбирать такие способы представления информации, которые будут достоверно и точно отображать состояние входов и выходов контроллера. Название внешних сигналов не должно ограничиваться только номером провода или контакта, оно должно также содержать в себе назначение сигнала, его функцию, быть написанным на понятном языке, без сокращений и выдуманных разработчиком сложных аббревиатур. Обязательно должны отображаться логические цепи формирования выходных сигналов. Решение данной проблемы — не новая задача, и в программируемых логических контроллерах (ПЛК) наряду с текстовыми языками применяются графические языки программирования: LD (Ladder Diagram) — язык релейных схем, FBD (Function Block Diagram) — язык функциональных блоков, SFC (Sequential Function Chart) — язык диаграмм состояний. Данные языки стандартизованы для применения в программируемых контроллерах в МЭК 61131-3[1]. Чтобы увидеть графическое отображение работы программы, созданной на одном из этих языков, необходимо подключить к ПЛК компьютер с установленной на нем средой разработки, в которую загружен исходный файл программы. Далее нужно синхронизировать программу в компьютере с программой в ПЛК. Тут опять возникает множество вопросов, не всегда имеющих адекватное решение: — поставляется ли с оборудованием файл исходной программы? — имеется ли в оперативном доступе компьютер с установленной средой разработки? — есть ли возможность для подключения компьютера к ПЛК? — необходима ли лицензия на использование среды разработки? — есть ли вообще специалист, знакомый со средой разработки и умеющий разбираться в программах на перечисленных языках? Даже если на все подобные вопросы ответить утвердительно, то остаются проблемы однозначного понимания применяемого алгоритма работы, использования нестандартных блоков и подпрограмм, созданных разработчиками оборудования, назначения внутренних переменных и комментариев. Из приведенных в пример графических языков у специалиста по информационным технологиям, не знакомого с ПЛК, только язык диаграмм состояний может не вызвать вопросов. Для небольших алгоритмов достаточно прост и понятен язык релейных схем LD, но программы с большим количеством блоков, написанные на нем, могут вызвать серьезные затруднения. Язык функциональных блоков FBD похож на принципиальную схему на логических микросхемах и более понятен специалистам по электронике, чем программистам. На практике разворачивание диагностического комплекса, содержащего среду разработки, с привлечением соответствующих специалистов требует времени, в течение которого оборудование простаивает. Решение встроить диагностический комплекс в оборудование снимает часть проблем, возникающих при поломках, и позволяет наладчикам сразу же начать диагностику неисправности. Однако это довольно дорогое решение, которое не всегда может быть применено по экономическим соображениям. Встроенный в оборудование диагностический комплекс также повысит требования к квалификации сервисных инженеров. Теперь на время простоя будет влиять не скорость развертывания диагностического оборудования, а время, требующееся на привлечение к ремонту необходимых специалистов, особенно если их нет в штате предприятия. Языки, входящие в стандарт МЭК 61131-3, упорядочивают процесс разработки программ и снижают затраты на перенос программ с контроллеров одного производителя на контроллеры другого. Специалист, освоивший стандартные языки программирования контроллеров, может разобраться в программах, написанных для контроллеров разных производителей, но для поиска неисправностей еще необходимо знание особенностей контролируемого процесса и алгоритма работы, осуществляемого при помощи данного оборудования. К примеру, специалист, разбирающийся только в работе вентиляционного оборудования, скорее всего, не сможет быстро перейти на обслуживание газовых турбин или грузоподъемного оборудования, хотя язык программирования этих систем может быть одним и тем же. Попробуем определить какую информацию и в каком виде нужно иметь обслуживающему персоналу, чтобы быстро и точно найти причину неисправности оборудования, а после ее устранения убедиться в правильности действий. Во-первых, работнику должно быть понятно назначение оборудования или системы, которую он собирается ремонтировать. Неисправной может быть только какая-то часть большого и сложного комплекса, о котором можно иметь лишь общее представление. Обычно сложные системы состоят из частей или модулей, и специалисту по ремонту нужно понимать назначение и функцию неисправной части. А лучше, чтобы сам модуль мог сообщать о своем назначении и функции в системе, информировать об алгоритме своей работы и встроенных ограничителях, например аварийных кнопках, датчиках уровня, концевых выключателях. Кроме того, обязательно должны быть представлены контролируемые параметры и их границы. Во-вторых, необходимо иметь однозначную информацию о назначении входных и выходных сигналов. Так как функция программируемого контроллера, управляющего оборудованием, — формировать выходные сигналы и данные, то специалисту по ремонту необходима информация о том, как формируются выходные сигналы и данные. Причем эта информация должна быть представлена в простом и понятном виде. Применяемые при управлении объектами сложные алгоритмы имеют разные уровни детализации, и необходимо предоставить заинтересованным лицам такой уровень описания, когда алгоритм остается ясным и не тонет во множестве деталей. Можно и дальше добавлять требования к визуализации состояния оборудования, тем самым увеличивая нагрузку на программирование графической части программы. Но лучше, чтобы все эти требования имели автоматическую реализацию в среде разработки. Чтобы в момент написания программы создавалось такое графическое представление алгоритма, которое может быть использовано при сопровождении готового продукта. Теперь необходимо задаться вопросом о том, как эта информация может быть доведена до пользователя и воспринята им. И здесь стоит отойти от оборудования и алгоритмов его работы и рассмотреть уже сложившиеся способы донесения информации до человека.1. Введение в табличное программирование контроллеров
1.1. Почему таблица?
Многообразие форм информационных потоков, воспринимаемых человеком, несколько усложняет выбор такого метода, который применим в рассматриваемом случае. Ведь необходимо не только информировать человека о состоянии контролируемого процесса и его критических параметрах, но и показывать состояние входов и выходов контроллеров, их назначение и алгоритмы формирования выходных значений. Можно сузить круг поиска и рассматривать наиболее близкие для специалиста формы представления информации. Обычно специалист в области автоматизации — это человек с техническим образованием, привыкший работать на компьютере, понимающий основы булевой алгебры, разбирающийся в базовых алгоритмах. Обучение профессии и последующая деятельность такого специалиста постоянно тренируют его в быстром восприятии и анализе таких форм представления информации, как графики, схемы, таблицы, диаграммы, блок-схемы, списки, тексты, чертежи и тому подобное. И здесь наступает момент выбора одной или нескольких таких форм. Все они имеют свои плюсы и минусы и могут быть адаптированы для решения поставленной задачи. При рассмотрении наиболее подходящих форм предоставления информации отбиралась та, которая позволяет объединить в себе максимальное количество необходимых свойств и не прибегать к дополнительному использованию других форм. Конечно, немалое влияние на выбор формы оказали предпочтения и опыт автора. С появлением персональных компьютеров появилась возможность интерактивной обработки данных. Вместо пакетной обработки, когда между изменениями в программе или в данных и получением результата проходили часы или дни, появилась возможность видеть результат практически сразу после внесения изменений. Раньше перед автором стояла задача обработки рентгеновских спектров, получаемых при анализе содержания полезных элементов в руде. Для этого была написана соответствующая программа. Применение персонального компьютера позволило сохранять большое количество спектров, представляющих собой массивы, размерность которых соответствовала количеству каналов спектрометра, а значение элемента массива — интенсивности излучения. Программы электронных таблиц еще не были распространены, но в научной литературе обсуждалась их концепция и ожидаемая будущая популярность. Понимание того, что, используя электронную таблицу, можно упростить обработку спектров, сортировку и хранение, а также просто и наглядно решить множество вопросов, возникающих при определении состава проб, усиливало ожидание появления такого программного продукта. Появление Microsoft Excel версии 3.0 и выше отодвинуло существовавшие на то время программы электронных таблиц других производителей на задний план. Хотя необходимо отметить, что электронная таблица Quattro Pro 9, входящая в Corel WordPerfect Office 2000, по своим возможностям не уступала аналогичной версии Microsoft Excel, но к этому времени MS Excel фактически стал стандартом. Особенно порадовала возможность заморозки части таблицы, как по вертикали, так и по горизонтали. Теперь можно было работать с довольно большими таблицами, используя замороженную часть как многострочный заголовок с возможностью видеть большое количество вычисляемых параметров. К примеру, таблица прихода и расхода комплектующих после появления MS Excel была сделана за пару часов и учитывала жизненный цикл каждой партии товара. Недостаток таких решений, состоящий в невысокой защищенности данных от случайных изменений, с лихвой покрывался скоростью получения интересующей вас информации и ее наглядностью. Вообще информация, представленная в виде таблицы, легко воспринимается и анализируется человеком. Горизонтальные и вертикальные связи не затрудняют восприятие, а, наоборот, облегчают его. Достаточно беглого взгляда на товарный ценник, составленный в виде таблицы, чтобы понять, сколько представлено товарных позиций и какой у них диапазон цен. Мы непрерывно тренируемся в скоростном восприятии информации, представленной в виде таблиц. Календари, расписания, товарные чеки, окно с файлами на экране компьютера — не что иное, как таблицы, отформатированные особым образом. Даже арифметические вычисления в столбик в тетрадке в клеточку прививают нам способность быстрого анализа табличных данных. Остается вопрос, как приспособить эту замечательную способность человека к решению рассматриваемой задачи — программированию контроллера, управляющего оборудованием.
Для решения большинства проблем, связанных с отображением внутреннего состояния программы, которая управляет техническим объектом, предлагается выводить состояние программы в виде специальной таблицы на экран монитора или сенсорного дисплея удобного размера. Таблица с внутренним состоянием контроллера может находиться в одной из закладок монитора, на который в обычном режиме выводится информация о контролируемом процессе или другие необходимые данные. Специалисту, программирующему контроллер, не нужно создавать таблицу и организовывать отображение данных, таблица и является программой. Кроме данных в ячейках таблицы, нет никаких дополнительных блоков или файлов. Она же, по сути, и графический интерфейс между машиной и человеком. В ней мы видим состояние всех переменных. От программиста скрыт только код, пересчитывающий данные в ячейках. И самое главное, таблица является средством разработки программы контроллера. Отпадает необходимость в сложной и дорогостоящей среде для написания и отладки программ, загружаемых в контроллеры.
Так как отсутствует многоуровневая система меню для изменения параметров и на экран выводится одна-единственная таблица, в которой отображается весь процесс, то многократно сокращается время обучения программированию контроллеров. Может сложиться впечатление, что такая таблица будет иметь тысячи строк и столбцов, но это на самом деле далеко не так. Например, программа управления портальным краном, имеющим две лебедки, стреловой, поворотный механизм и систему передвижения, содержит 180 строк и 30 столбцов. Простые программы управления небольшими объектами часто не нуждаются в прокрутке строк или столбцов, помещаясь на экране целиком.
Для больших программ или программ, имеющих довольно большие повторяющиеся блоки, можно организовать многостраничную структуру, состоящую из нескольких таблиц на отдельных страницах, причем пересчет таблиц нужно производить параллельно. Так как параллельная обработка страниц выполняется циклически, то она не приведет к появлению ошибок, связанных с синхронизацией. Выходные данные от одной страницы по мере готовности могут участвовать в расчетах на другой странице. Если какие-либо данные с параллельной страницы не были готовы в этом цикле пересчета таблицы, то они могут быть готовы в одном из следующих. Программы на отдельных страницах можно рассматривать как программы, работающие в отдельных контроллерах. Так как подобные виртуальные контроллеры используют одну память, то практически нет ограничения скорости передачи данных между ними. Но чтобы не потерять прозрачность общего алгоритма, при многостраничной организации программы следует минимизировать связи между страницами.
Вообще информация, представленная в виде таблицы, легко воспринимается и анализируется человеком. Горизонтальные и вертикальные связи не затрудняют восприятие, а, наоборот, облегчают его. Достаточно беглого взгляда на товарный ценник, составленный в виде таблицы, чтобы понять, сколько представлено товарных позиций и какой у них диапазон цен. Мы непрерывно тренируемся в скоростном восприятии информации, представленной в виде таблиц. Календари, расписания, товарные чеки, окно с файлами на экране компьютера — не что иное, как таблицы, отформатированные особым образом. Даже арифметические вычисления в столбик в тетрадке в клеточку прививают нам способность быстрого анализа табличных данных. Остается вопрос, как приспособить эту замечательную способность человека к решению рассматриваемой задачи — программированию контроллера, управляющего оборудованием.
Для решения большинства проблем, связанных с отображением внутреннего состояния программы, которая управляет техническим объектом, предлагается выводить состояние программы в виде специальной таблицы на экран монитора или сенсорного дисплея удобного размера. Таблица с внутренним состоянием контроллера может находиться в одной из закладок монитора, на который в обычном режиме выводится информация о контролируемом процессе или другие необходимые данные. Специалисту, программирующему контроллер, не нужно создавать таблицу и организовывать отображение данных, таблица и является программой. Кроме данных в ячейках таблицы, нет никаких дополнительных блоков или файлов. Она же, по сути, и графический интерфейс между машиной и человеком. В ней мы видим состояние всех переменных. От программиста скрыт только код, пересчитывающий данные в ячейках. И самое главное, таблица является средством разработки программы контроллера. Отпадает необходимость в сложной и дорогостоящей среде для написания и отладки программ, загружаемых в контроллеры.
Так как отсутствует многоуровневая система меню для изменения параметров и на экран выводится одна-единственная таблица, в которой отображается весь процесс, то многократно сокращается время обучения программированию контроллеров. Может сложиться впечатление, что такая таблица будет иметь тысячи строк и столбцов, но это на самом деле далеко не так. Например, программа управления портальным краном, имеющим две лебедки, стреловой, поворотный механизм и систему передвижения, содержит 180 строк и 30 столбцов. Простые программы управления небольшими объектами часто не нуждаются в прокрутке строк или столбцов, помещаясь на экране целиком.
Для больших программ или программ, имеющих довольно большие повторяющиеся блоки, можно организовать многостраничную структуру, состоящую из нескольких таблиц на отдельных страницах, причем пересчет таблиц нужно производить параллельно. Так как параллельная обработка страниц выполняется циклически, то она не приведет к появлению ошибок, связанных с синхронизацией. Выходные данные от одной страницы по мере готовности могут участвовать в расчетах на другой странице. Если какие-либо данные с параллельной страницы не были готовы в этом цикле пересчета таблицы, то они могут быть готовы в одном из следующих. Программы на отдельных страницах можно рассматривать как программы, работающие в отдельных контроллерах. Так как подобные виртуальные контроллеры используют одну память, то практически нет ограничения скорости передачи данных между ними. Но чтобы не потерять прозрачность общего алгоритма, при многостраничной организации программы следует минимизировать связи между страницами.
1.2. Основы табличного программирования
Для начала рассмотрим таблицу, показанную на рис. 1. В левый столбец таблицы вводятся логические состояния входов контроллера, а в ячейках верхнего заголовка рассчитываются выходные значения. Состояние каждого выхода будем определять как логическое И по столбцу под ним. Рис. 1. Пример таблицы
Рис. 1. Пример таблицы
Чтобы таблица стала программой, внесем в нее некоторые изменения. Ячейки в теле таблицы, участвующие в расчете выходных значений, будем называть активными ячейками. Для обозначения активной ячейки используется символ «&», который в электронике и программировании обычно является символом битовой операции «логическое И». Чтобы увеличить наглядность таблицы, активные ячейки, состояние которых равно нолю, выделим синим цветом, а ячейки, состояние которых равно единице, — зеленым цветом. Таким же образом обозначим результат логического И по столбцу. Простая табличная программа представлена на рис. 2.
 Рис. 2. Пример простой табличной программы
Рис. 2. Пример простой табличной программы
Пересчет таблицы выполняется следующим образом. Сначала идет обработка строк сверху вниз. Значение в каждой строке определяется входной переменной. В данном случае оно соответствует логическому уровню на соответствующем входе контроллера. При наличии в строке активных ячеек всем таким ячейкам строки присваивается полученное значение. По окончании перебора строк вычисляются значения выходных переменных — как логическое И по ячейкам столбца под каждой выходной переменой. В этом виде данные в таблице сложно назвать программой, однако под определение программы по ГОСТ 19.781-90[2] — «данные, предназначенные для управления конкретными компонентами системы обработки информации в целях реализации определенного алгоритма» — она подходит. Для написания или создания программы в такой таблице сначала нужно заполнить первый столбец именами входных переменных или комментариями к ним и указать соответствующий номер входного контакта контроллера. Затем заполнить верхнюю строку-заголовок именами выходных переменных, также добавив номера контактов, соответствующие выходам контроллера. Теперь остается ввести в ячейки, которые будут участвовать в формировании выходных значений, символ «&». В принципе, все, программа написана. В результате поисков удобного формата таблицы, который бы легко воспринимался специалистом, даже не писавшим программу, из всех возможных операций в столбце было оставлено только логическое И. Это сделано для удобства быстрого анализа состояния программы в таблице. Если в столбце хоть одна активная ячейка принимает значение ноль, то результат тоже будет ноль. Если все активные ячейки столбца будут равны единице, то выходная переменная над столбцом также будет равна единице. Выделение синим цветом ячеек, находящихся в состоянии «ноль», и зеленым цветом ячеек в состоянии «единица» помогает увидеть всю картину целиком, быстро найти ячейки, цвет которых не соответствует вашим ожиданиям.
1.3. Триггерные ячейки
Чтобы зафиксировать однократное появление сигнала в логических цепях, используются триггеры. Базовым видом триггеров является асинхронный RS-триггер, состояние выхода которого меняется в зависимости от логических уровней на его входах, обозначаемых буквами R и S. Для установки на выходе RS-триггера единицы на вход «S» подают логическую единицу, а для сброса выхода в ноль логическую единицу подают на вход «R». Добавим в табличную программу возможность фиксировать однократное появление сигнала. Для этого в каждом столбце создадим свой RS-триггер с одним выходом и произвольным количеством входов. Ячейки, реализующие триггерные операции в программе, будем называть триггерными ячейками. Табличная программа, использующая триггерные ячейки, представлена на рис. 3. Рис. 3. Пример табличной программы, использующей триггерные ячейки
Рис. 3. Пример табличной программы, использующей триггерные ячейки
В верхний заголовок таблицы добавлена строка «RS». Каждая ячейка этой строки является выходом RS-триггера столбца, входы для которого находятся в ячейках под ним. Для того чтобы управлять этим выходом, в столбец добавлены ячейки, которые изменяют его состояние. Ячейки, использующиеся для сброса в ноль, будем обозначать символом «R», а для установки в единицу — символом «S». Ячейки «R» и «S» будем называть активными триггерными ячейками. Выберем для них следующее цветовое обозначение: серый для состояния «ноль» и пурпурный для состояния «единица». Ячейки в строке «RS» хоть и являются триггерными, но обозначены символом «&», так как они наравне с другими активными ячейками будут участвовать в логическом И по столбцу. Начальное значение ячеек в строке «RS» равно единице. Это сделано для того, чтобы при отсутствии в столбце активных триггерных ячеек «R» и «S» ячейка «RS» не блокировала нулем результат логического И по столбцу. Выход триггера столбца, которым является ячейка «RS», управляется следующим образом. Если в столбце ячейка «R» принимает значение «единица», то значение ячейки «RS» в заголовке сбрасывается в ноль. Если же в столбце ячейка «S» принимает значение «единица», то значение ячейки «RS» устанавливается в единицу. При возвращении состояния ячейки «R» или «S» в ноль ячейка «RS» не меняет свое значение. Происходит «защелкивание». Так как внутренний интерпретатор проходит по таблице сверху вниз, то при многократном применении в столбце триггерных ячеек значение ячейки «RS» будет определяться нижней триггерной ячейкой. После учета состояния всех ячеек «R» и «S» столбца значение ячейки «RS» участвует в операции «логическое И» наравне с ячейками столбца, обозначенными символом «&».
1.4. Логические операции над входными переменными
Сигналы состояний устройств, такие как готовность к работе или предупреждение о неисправности, могут быть сформированы с помощью логических операций над входными переменными. Применение логических операций над входными переменными не только расширяет функционал таблицы, но также уменьшает количество активных ячеек. В логическом И по столбцу теперь могут участвовать не значения входных переменных, а сигналы состояний механизмов и систем. Вместо использования нескольких активных ячеек, отражающих логические уровни дискретных датчиков какого-либо устройства, будет нужна всего лишь одна активная ячейка с сигналом готовности этого устройства. Такой подход упрощает программирование и, самое главное, улучшает читаемость программы. Добавим в таблицу столбцы, необходимые для выполнения операций над входными значениями. Чтобы улучшить читаемость программы, немного изменим внешний вид таблицы. Вставим дополнительные строки, которые будут разделять программу на блоки, а комментарии в строках, имеющих активные ячейки, выделим светло-серым фоном. Фон в остальных ячейках оставим белым. Табличная программа с внесенными изменениями показана на рис. 4. Рис. 4. Табличная программа с логическими операциями над входными переменными
Рис. 4. Табличная программа с логическими операциями над входными переменными
Сначала рассмотрим возможность инвертирования входных логических сигналов для дальнейшего использования в программе. Одни сигналы, поступающие на вход контроллера, могут приходить с датчиков, имеющих нормально открытый контакт (НО), и при срабатывании такого датчика на входе контроллера будет уровень, соответствующий единице. Другие же датчики могут иметь нормально замкнутый контакт (НЗ), и при их срабатывании на входе контроллера появится ноль. Реализуемый в программе алгоритм может потребовать инвертированных входных сигналов. Если инверсии не требуется, запишем в ячейку операции знак «=». Для инверсии входного значения в ячейку операции запишем слово «NOT». В строке 10 таблицы на рис. 4 значение переменной b1 сначала инвертируется, а потом участвует в логической операции «исключающее ИЛИ». Далее рассмотрим применение основных логических операций — «И», «ИЛИ», «исключающее ИЛИ» — для обработки входных переменных перед присвоением результата активным ячейкам таблицы. Так как для операций «И», «ИЛИ», «исключающее ИЛИ» требуются не менее двух аргументов, то две строки будут формировать аргументы, а результат поместим в третью строку. Конструкция будет напоминать арифметическое действие в столбик. Многострочные логические операции производятся над данными в столбце «Результат», и в этом же столбце записывается ответ. Расположение в одном столбце операндов и результата операции позволяет использовать полученный результат в качестве одного из операндов для следующей операции. На рис. 4 в ячейке «Результат» строки 4 будет ответ на логическое И содержимого двух ячеек, расположенных выше. Аналогично — в строке 8 для операции логическое «ИЛИ» и в строке 12 для операции «исключающее ИЛИ». В обычном для текстовых языков программирования виде это будет выглядеть следующим образом: — строка 4: b3 = b1 AND b2 // 0 AND 1 = 0; — строка 8: b4 = b1 OR b2 // 0 OR 1 = 0; — строка 12: b5 = NOT (b1) XOR b2 // 1 XOR 1 = 0.
1.5. Инверсия выходных переменных
Иногда бывает необходимо, чтобы один из выходных сигналов контроллера был инвертирован — например, если в схеме устройства используется сигнал, состояние которого должно быть равным нолю, когда результат логического И по столбцу дает единицу. Чтобы реализовать такую возможность, дополним верхний заголовок таблицы двумя строками: «Операция» и «Результат» (рис. 5).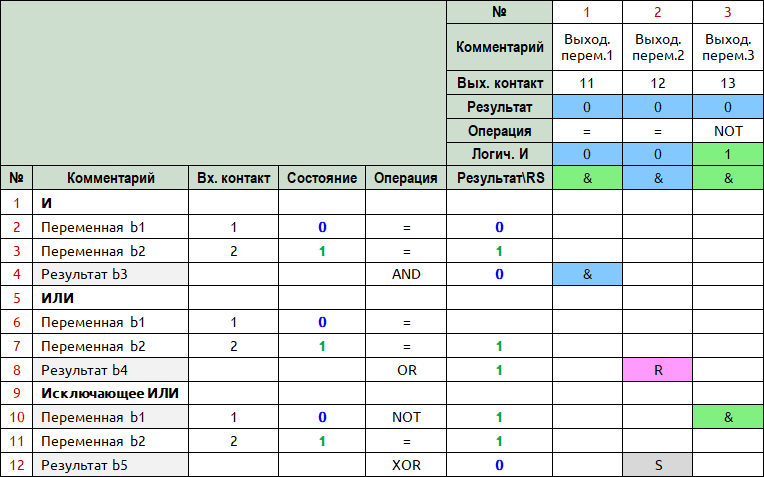 Рис. 5. Табличная программа с логическими операциями над входными и выходными переменными
Рис. 5. Табличная программа с логическими операциями над входными и выходными переменными
Для выходных переменных, которым не требуется инверсия, в ячейку «Операция» запишем «=», а для переменных, значение которых нужно инвертировать, запишем «NOT». В приведенном на рис. 5 примере выходной переменной 3 присваивается инвертированное значение логического И по столбцу 3 с помощью операции «NOT».
1.6. Таймеры
Управление оборудованием часто требует жестких временных рамок. Иногда требуется задержка между последовательным включением механизмов или систем, иногда наоборот — между последовательным их выключением. Наиболее ответственные операции должны выполняться за определенное время, и если этого не происходит, то оператору выдается предупреждение или происходит остановка процесса. Для формирования временных интервалов в программах контроллеров используются различные таймеры. Наиболее распространенные — таймер с задержкой на включение TON (timer on delay), таймер с задержкой на выключение TOF (timer off delay), таймер, формирующий импульс заданной длительности, TP (timer pulse). Рассмотрим алгоритм работы каждого из них. В исходном состоянии на выходе таймера с задержкой на включение TON будет ноль (рис. 6). При переходе сигнала на его входе из ноля в единицу, то есть по переднему фронту сигнала, запускается обратный отсчет времени начиная со значения, предустановленного в параметрах таймера.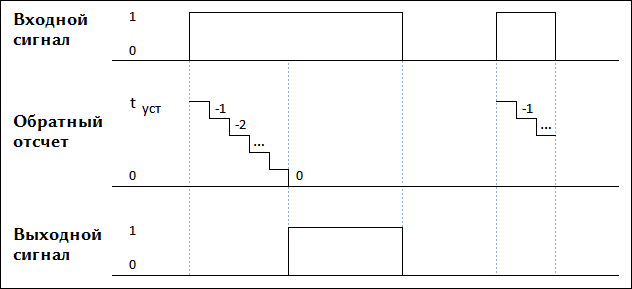 Рис. 6. Временная диаграмма таймера с задержкой на включение TON
Рис. 6. Временная диаграмма таймера с задержкой на включение TON
При достижении счетчиком нулевого значения на выходе таймера устанавливается единица. То есть сигнал, установившийся на входе таймера, появляется на выходе не сразу, а через заданное время. При возвращении входного сигнала в нулевое состояние выход таймера тоже будет равен нолю без какой-либо задержки. Если входной сигнал станет равным нолю до истечения предустановленного времени, то обратный отсчет прекратится, таймер перейдет в начальное состояние и сигнал на выходе не появится. У таймера с задержкой на выключение TOF в исходном состоянии на выходе будет ноль (рис. 7). При переходе входного сигнала из ноля в единицу на выходе таймера будет единица без какой-либо задержки.
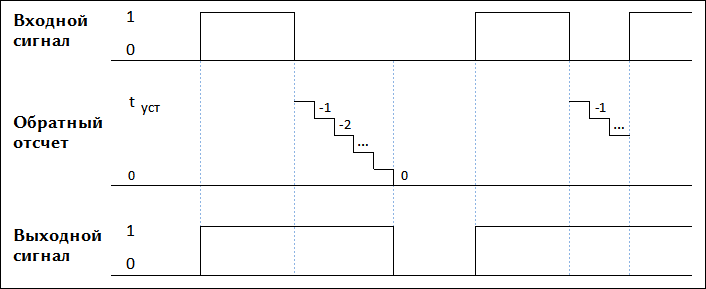 Рис. 7. Временная диаграмма таймера с задержкой на выключение TOF
Рис. 7. Временная диаграмма таймера с задержкой на выключение TOF
А при переходе сигнала на его входе из единицы в ноль, то есть по заднему фронту сигнала, запускается обратный отсчет времени начиная со значения, предустановленного в параметрах таймера. При достижении счетчиком нулевого значения выход таймера перейдет в ноль. То есть установившийся на входе таймера ноль появится на выходе не сразу, а через заданное время. Если входной сигнал станет единицей до истечения предустановленного времени, то обратный отсчет прекратится, таймер перейдет в начальное состояние и на выходе останется единица. В исходном состоянии на выходе импульсного таймера TP будет ноль (рис. 8). При переходе сигнала на его входе из ноля в единицу, то есть по переднему фронту сигнала, на выходе таймера будет единица без какой-либо задержки. Сразу же запускается обратный отсчет времени начиная со значения, предустановленного в параметрах таймера. При достижении счетчиком нулевого значения на выходе таймера устанавливается ноль. Таким образом, по переднему фронту будет сформирован импульс заданной длительности. Возвращение входного сигнала в нулевое состояние до истечения заданного времени не повлияет на формирование импульса. Если входной сигнал снова станет единицей и будет сформирован передний фронт, то таймер будет перезапущен и отсчет начнется заново.
 Рис. 8. Временная диаграмма таймера, формирующего импульс заданной длительности, TP
Рис. 8. Временная диаграмма таймера, формирующего импульс заданной длительности, TP
Чтобы при необходимости в программе можно было формировать временные интервалы, добавим в таблицу три столбца. Первый соответствует типу используемого таймера, второй — установленному времени, третий — текущему состоянию внутреннего счетчика таймера. Дополнительно сократим названия колонок и отформатируем таблицу. Табличная программа с внесенными изменениями представлена на рис. 9.
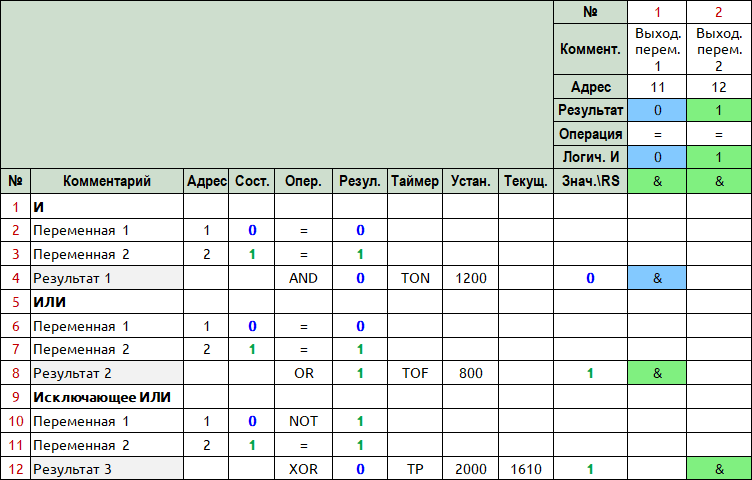 Рис. 9. Пример использования таймеров
Рис. 9. Пример использования таймеров
Результат операции над входными переменными сначала будет поступать на вход таймера, выходное значение которого будет присваиваться активным ячейкам строки. Если тип таймера не указан, то результат логической операции записывается в активные ячейки без задержки. Если результат входной логической операции не используется в активных ячейках строки, то ячейка этой строки в столбце «Знач.» остается пустой. Это сделано для того, чтобы в столбце «Знач.» отображались только те значения, которые используются для логического И по столбцам. В приведенной на рис. 9 таблице используются три таймера: таймер с задержкой на включение TON, таймер с задержкой на выключение TOF, таймер, формирующий импульс, TP. Теперь результат логической операции над входными переменными записывается в ячейки столбца «Резул.», а логический уровень выхода таймера — в ячейки столбца с названием «Знач.». Тип применяемого в строке таймера указывается в столбце «Таймер». Время работы таймера записывается в миллисекундах в столбце «Устан.». При обратном отсчете времени текущее состояние внутреннего счетчика таймера будет выводиться в ячейку «Текущ.». Пример отображения обратного отсчета показан в строке 12 (рис. 9). Установленная в строке 12 длительность импульса равна 2000 миллисекунд, или 2 секунды, до окончания импульса остается 1610 миллисекунд, или 1,61 секунды. По истечении этого времени значение в столбце «Знач.» по строке 12 перейдет из единицы в ноль. В строках таблицы 4 и 8 также используются таймеры, однако их текущее значение времени не отображается, следовательно, в данный момент таймеры в этих строках неактивны. Можно заметить, что заголовок «Входной контакт» заменен на «Адрес», но цифры в столбце остались те же. Это сделано для того, чтобы максимально приблизить табличную программу к электрической схеме. Обычно при программировании контроллера с помощью графических языков программирования переменным присваиваются адреса с точностью до бита, хотя в среде программирования контроллера каждой переменной соответствует определенная структура размером в несколько десятков байтов. Назначение адресов с точностью до бита не более чем исторически сложившаяся практика. В табличной программе адрес входной или выходной переменной может соответствовать порядковому номеру контакта на разъеме контроллера. Тип переменной будет определяться ее адресом. К примеру, первые десять адресов будут принадлежать входным битовым переменным, а адреса с одиннадцатого по двадцатый — выходным битовым переменным.
2. Табличное программирование. Пример разработки программы
2.1. Простая программа управления шлагбаумом
Рассмотрим работу табличной программы на конкретном примере. Для этого создадим программу управления простым шлагбаумом с электроприводом. Сначала опишем алгоритм работы и основное оборудование такого шлагбаума.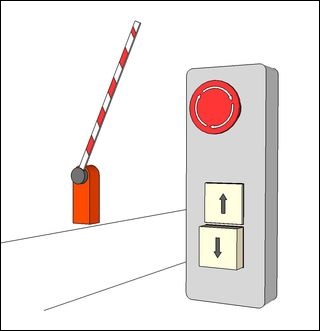 Управление шлагбаумом производится нажимным двухкнопочным выключателем с фиксацией, возврат одной кнопки которого происходит при нажатии другой кнопки. Введем правило: шлагбаум может быть либо открыт, либо закрыт, остановку стрелы шлагбаума в промежуточном состоянии считаем аварийной. Если нажата кнопка «Открыть», то шлагбаум должен открыться, и мы сможем нажать только кнопку «Закрыть», так как кнопка «Открыть» зафиксирована в нажатом состоянии. Верхний и нижний концевые выключатели при срабатывании должны останавливать двигатель. Так как работа шлагбаума может нанести вред людям или имуществу, то необходимо предусмотреть в схеме аварийную кнопку и главный контактор, отключающий силовое питание при нажатии на нее. Аварийная кнопка должна иметь дополнительный контакт для сигнализации о том, что она находится в нажатом состоянии. Не углубляясь в схему реверсивного управления двигателем, поднимающего и опускающего стрелу шлагбаума, будем считать, что два выхода контроллера, обозначенные как «Вверх» и «Вниз», будут управлять движением стрелы.
Управление шлагбаумом производится нажимным двухкнопочным выключателем с фиксацией, возврат одной кнопки которого происходит при нажатии другой кнопки. Введем правило: шлагбаум может быть либо открыт, либо закрыт, остановку стрелы шлагбаума в промежуточном состоянии считаем аварийной. Если нажата кнопка «Открыть», то шлагбаум должен открыться, и мы сможем нажать только кнопку «Закрыть», так как кнопка «Открыть» зафиксирована в нажатом состоянии. Верхний и нижний концевые выключатели при срабатывании должны останавливать двигатель. Так как работа шлагбаума может нанести вред людям или имуществу, то необходимо предусмотреть в схеме аварийную кнопку и главный контактор, отключающий силовое питание при нажатии на нее. Аварийная кнопка должна иметь дополнительный контакт для сигнализации о том, что она находится в нажатом состоянии. Не углубляясь в схему реверсивного управления двигателем, поднимающего и опускающего стрелу шлагбаума, будем считать, что два выхода контроллера, обозначенные как «Вверх» и «Вниз», будут управлять движением стрелы.
 Опишем алгоритм управления шлагбаумом. При нажатии на кнопку «Открыть» на выходе контроллера «Вверх» появляется единица и держится до срабатывания верхнего концевого выключателя. Аналогично, если будет нажата кнопка «Закрыть», на выходе контроллера «Вниз» появляется единица и держится до срабатывания нижнего концевого выключателя. Если во время опускания стрелы шлагбаума оператор увидит помеху, то он может кнопкой «Открыть» переключить двигатель на подъем стрелы. При нештатных ситуациях оператор нажимает аварийную кнопку.
Рассмотрим работу программы при переводе стрелы шлагбаума из открытого состояния в закрытое. Для открытого состояния шлагбаума управляющая программа представлена на рис. 10.
Опишем алгоритм управления шлагбаумом. При нажатии на кнопку «Открыть» на выходе контроллера «Вверх» появляется единица и держится до срабатывания верхнего концевого выключателя. Аналогично, если будет нажата кнопка «Закрыть», на выходе контроллера «Вниз» появляется единица и держится до срабатывания нижнего концевого выключателя. Если во время опускания стрелы шлагбаума оператор увидит помеху, то он может кнопкой «Открыть» переключить двигатель на подъем стрелы. При нештатных ситуациях оператор нажимает аварийную кнопку.
Рассмотрим работу программы при переводе стрелы шлагбаума из открытого состояния в закрытое. Для открытого состояния шлагбаума управляющая программа представлена на рис. 10.
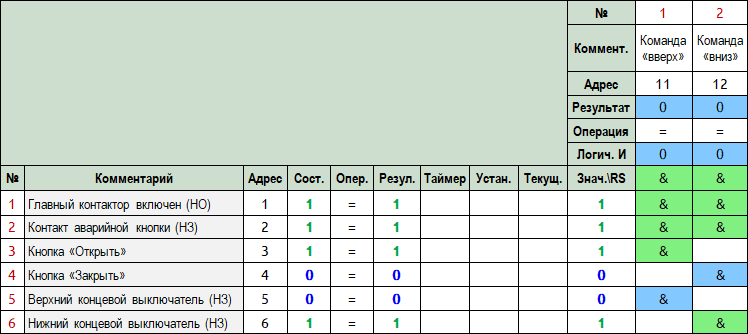 Рис. 10. Табличная программа управления шлагбаумом, соответствующая открытому состоянию шлагбаума
Рис. 10. Табличная программа управления шлагбаумом, соответствующая открытому состоянию шлагбаума
Можно увидеть, что питание включено, аварий нет, шлагбаум открыт, команды «вверх» и «вниз» равны нолю. По тому, что верхний концевой выключатель разомкнут, можно определить, что стрела шлагбаума находится в верхнем конечном положении. Нажатие на кнопку «Закрыть» выключит кнопку «Открыть», активные ячейки в таблице под командой «вниз» получат состояние «единица» и станут отображаться зеленым цветом. Логическое И по столбцу 2 даст в результате единицу. На выходном контакте 12 появится напряжение, соответствующее логической единице, и двигатель будет включен для опускания стрелы шлагбаума. Начнется движение вниз (рис. 11).
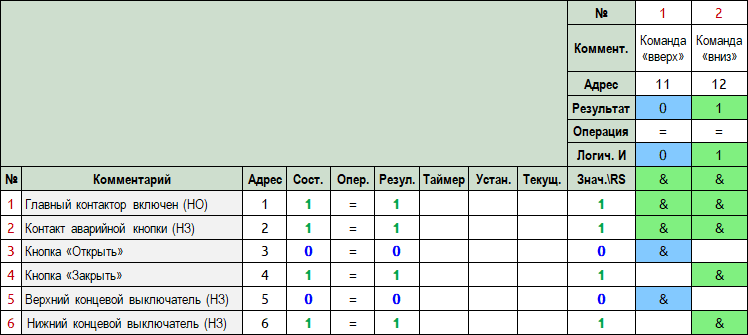 Рис. 11. Табличная программа управления шлагбаумом в момент нажатия кнопки «Закрыть»
Рис. 11. Табличная программа управления шлагбаумом в момент нажатия кнопки «Закрыть»
После начала движения вниз верхний концевой выключатель перейдет в замкнутое состояние. Если не будет никаких действий со стороны оператора, движение стрелы вниз будет совершаться до срабатывания нижнего концевого выключателя. Табличная программа в момент движения стрелы вниз представлена на рис. 12.
 Рис. 12. Табличная программа управления шлагбаумом в момент движения стрелы вниз
Рис. 12. Табличная программа управления шлагбаумом в момент движения стрелы вниз
Как только стрела достигнет положения «закрыто», сработает нижний концевой выключатель. Соответствующая ему ячейка в столбце под командой «вниз» получит значение ноль, результатом логического И по этому столбцу станет ноль, и двигатель будет отключен. Таблица перейдет в состояние «закрыто» (рис. 13).
 Рис. 13. Табличная программа управления шлагбаумом, соответствующая закрытому состоянию шлагбаума
Рис. 13. Табличная программа управления шлагбаумом, соответствующая закрытому состоянию шлагбаума
На простом примере несложно увидеть, что благодаря табличному программированию прямо во время выполнения программы можно наблюдать состояния входов, выходов и цепей формирования выходных сигналов. Нет скрытых модулей обработки, полностью понятен алгоритм управления устройством. Во многих случаях нет необходимости в разработке графического интерфейса. Как только на контроллер с табличной программой будет подано питание и начнет работать системная программа, на экран монитора будет выводиться таблица с программой пользователя, загруженной из постоянной памяти. Внутренний интерпретатор начнет пересчет таблицы, и с самого начала работы будет отображаться состояние программы, управляющей оборудованием, в реальном масштабе времени. Отпадает необходимость в подключении специального компьютера с установленной средой разработки и наличием исходной программы для контроля цепей формирования выходных сигналов. Пока может показаться, что табличное программирование пригодно для простых, даже примитивных алгоритмов, но это не так. Данный, упрощенный вариант программы имеет много недостатков и не может использоваться для управления реальным объектом. В таком упрощенном виде он представлен для демонстрации основной идеи применения табличного программирования. Далее будут рассмотрены более сложные примеры табличных программ.
2.2. Использование триггерных ячеек
Одним из недостатков первой версии программы управления шлагбаумом является жесткая зависимость пуска приводного двигателя от состояния концевых выключателей. Если из-за раскачки стрелы шлагбаума на ветру или намокания контактов произойдет замыкание концевого выключателя, то это может привести к неконтролируемому включению двигателя стрелы, так как одна из кнопок, «Открыть» или «Закрыть», уже нажата. Попробуем повысить надежность системы управления шлагбаумом. Изменим способ подачи команд «открыть» и «закрыть». Вместо двухкнопочного выключателя с фиксацией применим обычные нажимные кнопки. Это более надежное и удобное решение. Также добавим кнопку «Стоп», при нажатии на которую состояние выходов 11 и 12, управляющих движением стрелы шлагбаума, становится равным нолю. Хотя нажатие на кнопку «Стоп» остановит движение, ею нельзя заменить аварийную кнопку. Аварийная кнопка должна отключить систему вне зависимости от работы контроллера. Необходимо отметить, что контакты кнопок «Открыть» и «Закрыть» нормально открытые, а контакт кнопки «Стоп» нормально замкнутый. Это сделано для того, чтобы при неисправности кнопки «Стоп» или обрыве провода, соединяющего ее с контроллером, заблокировать команды открытия и закрытия. Кнопка «Стоп» наряду с аварийной кнопкой является частью системы безопасности, при неисправности которой запрещается работа механизмов.
Чтобы реализовать алгоритм управления с помощью кнопок, необходимо ввести в программу триггерные ячейки. Кнопка управления обычно имеет нормально открытый контакт, и при ее нажатии на входе контроллера появится единица. А концевой выключатель обычно имеет нормально замкнутый контакт, и при его срабатывании на входе контроллера будет уровень, соответствующий нолю. Но реализуемый в программе алгоритм требует, чтобы срабатывание конечного выключателя также давало единицу. Поэтому необходимо инвертировать некоторые входные логические сигналы. Для инверсии сигналов от конечных выключателей, кнопки «Стоп» и главного контактора в ячейку операции запишем слово «NOT».
Состояние программы при отсутствии силового питания представлено на рис. 14, изкоторого можно увидеть, что силовое питание выключено, аварий нет, шлагбаум открыт, команды «вверх» и «вниз» равны нолю. В отличие от первоначальной программы, верхняя строка перенесена вниз, а в строке 4 появился входной сигнал от кнопки «Стоп», приходящий на входной контакт номер 7. Во многих активных ячейках символ «&» заменен на «R» или «S».
Необходимо отметить, что контакты кнопок «Открыть» и «Закрыть» нормально открытые, а контакт кнопки «Стоп» нормально замкнутый. Это сделано для того, чтобы при неисправности кнопки «Стоп» или обрыве провода, соединяющего ее с контроллером, заблокировать команды открытия и закрытия. Кнопка «Стоп» наряду с аварийной кнопкой является частью системы безопасности, при неисправности которой запрещается работа механизмов.
Чтобы реализовать алгоритм управления с помощью кнопок, необходимо ввести в программу триггерные ячейки. Кнопка управления обычно имеет нормально открытый контакт, и при ее нажатии на входе контроллера появится единица. А концевой выключатель обычно имеет нормально замкнутый контакт, и при его срабатывании на входе контроллера будет уровень, соответствующий нолю. Но реализуемый в программе алгоритм требует, чтобы срабатывание конечного выключателя также давало единицу. Поэтому необходимо инвертировать некоторые входные логические сигналы. Для инверсии сигналов от конечных выключателей, кнопки «Стоп» и главного контактора в ячейку операции запишем слово «NOT».
Состояние программы при отсутствии силового питания представлено на рис. 14, изкоторого можно увидеть, что силовое питание выключено, аварий нет, шлагбаум открыт, команды «вверх» и «вниз» равны нолю. В отличие от первоначальной программы, верхняя строка перенесена вниз, а в строке 4 появился входной сигнал от кнопки «Стоп», приходящий на входной контакт номер 7. Во многих активных ячейках символ «&» заменен на «R» или «S».
 Рис. 14. Табличная программа управления шлагбаумом с использованием триггерных ячеек перед включением главного контактора
Рис. 14. Табличная программа управления шлагбаумом с использованием триггерных ячеек перед включением главного контактора
Начальное значение всех ячеек «RS» равно единице, и если не сбросить их в ноль, то возможно появление на выходах ВВЕРХ и ВНИЗ логической единицы, которая самопроизвольно запустит двигатель при первоначальной подаче питания. Чтобы этого не произошло, в строке 7 на входной контакт номер 1 приходит сигнал с главного контактора, коммутирующего силовое питание. После того, как на контроллер будет подано напряжение, а главный контактор еще не будет включен, на контакте номер 1 будет логический ноль, который после инверсии сбросит ячейки «RS». Пересчет таблицы внутренним интерпретатором производится сверху вниз, и значение ячейки «RS» определяется нижней триггерной активной ячейкой. Поэтому при отключенном главном контакторе ячейки «RS» будут находиться в сброшенном состоянии, независимо от сигналов кнопок управления. В целях безопасности должна быть предусмотрена схема, не позволяющая включать главный контактор при неработающем контроллере. На первый взгляд, достаточно блокировать включение главного контактора на время загрузки контроллера. Но наиболее правильным решением будет формирование на выходе контроллера сигнала готовности, который станет активным только после полной загрузки программы контроллера и разрешит включить главный контактор. Как только главный контактор будет включен, триггерные активные ячейки в строке 7 перейдут в нулевое состояние и больше не будут влиять на результат, а ячейки «RS» в верхнем заголовке останутся в ноле. Так как стрела шлагбаума находится в верхнем положении и верхний концевой выключатель сработал, то ячейка «RS» в первом столбце будет удерживаться в сброшенном состоянии и не позволит включить двигатель при нажатии на кнопку «Открыть». Шлагбаум, находящийся в открытом состоянии, дальше открываться не будет. Программа, готовая принять команду оператора, показана на рис. 15.
 Рис. 15. Табличная программа управления шлагбаумом с использованием триггерных ячеек после включения главного контактора
Рис. 15. Табличная программа управления шлагбаумом с использованием триггерных ячеек после включения главного контактора
Нажатие на кнопку «Закрыть» переведет ячейку «RS» во втором столбце из ноля в единицу, результат логического И по столбцу также будет равен единице. Команда «вниз» запустит двигатель, и стрела начнет опускаться. Состояние программы в этот момент показано на рис. 16.
 Рис. 16. Табличная программа управления шлагбаумом с использованием триггерных ячеек и нажатой кнопкой «Закрыть»
Рис. 16. Табличная программа управления шлагбаумом с использованием триггерных ячеек и нажатой кнопкой «Закрыть»
Стрела шлагбаума еще находится в верхнем конечном положении, начинается движение вниз. Силовое питание включено, аварий нет, команда «вниз» равна единице. После начала движения оператор отпустит кнопку «Закрыть», при этом выходная переменная с адресом 12 будет активной благодаря установленной в единицу ячейке «RS» во втором столбце, как показано на рис. 17.
 Рис. 17. Табличная программа управления шлагбаумом с использованием триггерных ячеек и отпущенными кнопками
Рис. 17. Табличная программа управления шлагбаумом с использованием триггерных ячеек и отпущенными кнопками
Стрела, дойдя до закрытого положения, выключит нижний концевой выключатель, ячейка «RS» во втором столбце будет сброшена, логическое И по второму столбцу будет равно нолю — и двигатель остановится (рис. 18).
 Рис. 18. Табличная программа управления шлагбаумом с использованием триггерных ячеек после срабатывания нижнего концевого выключателя
Рис. 18. Табличная программа управления шлагбаумом с использованием триггерных ячеек после срабатывания нижнего концевого выключателя
При всей кажущейся простоте программа управления шлагбаумом вполне может быть использована на реальном объекте. Можно добавить фотодатчики и другие обратные связи с механизмами, но сейчас нас интересует сама возможность управлять оборудованием простой программой в таблице.
2.3. Семь строк таблицы
Для управления оборудованием, в данном случае шлагбаумом, нам потребовалась табличная программа размером в семь строк. Большую часть программы занимают названия переменных или комментарии к ним, что эквивалентно схеме подключения из инструкции по эксплуатации. В таблице можно непрерывно видеть состояния входных и выходных переменных, а также цепи формирования сигналов. Программа управления шлагбаумом, графический интерфейс, система отладки с возможностью наблюдения за формированием сигналов в режиме реального времени и описание назначения физических выводов контроллера уместились в семь строк таблицы. Дополнительно можно создать графический интерфейс оператора, но в случае со шлагбаумом для индикации достаточно к схеме подключить несколько контрольных лампочек, а табличную программу, в случае необходимости, просматривать на экране смартфона, подключая его к контроллеру по беспроводной сети.2.4. Применение логических операций над входными переменными
Если высоты подъема стрелы будет недостаточно для проезда машины с негабаритным грузом, то у оператора должна быть возможность поднять стрелу выше положения, при котором срабатывает верхний концевой выключатель. Это нештатный режим работы, и он должен осуществляться под полным контролем оператора и его помощника. Обычно для обхода концевых выключателей используется кнопка «Шунт», при нажатии и удержании которой блокируются концевые выключатели. Пока в программе управления шлагбаумом применялись только две операции над входными переменными — «=» и «NOT». Табличная программа с использованием логической операции «AND» над входными переменными показана на рис. 19. В ней можно увидеть, что силовое питание включено, аварий нет, стрела шлагбаума находится в верхнем конечном положении, следовательно, шлагбаум открыт.
Пока в программе управления шлагбаумом применялись только две операции над входными переменными — «=» и «NOT». Табличная программа с использованием логической операции «AND» над входными переменными показана на рис. 19. В ней можно увидеть, что силовое питание включено, аварий нет, стрела шлагбаума находится в верхнем конечном положении, следовательно, шлагбаум открыт.
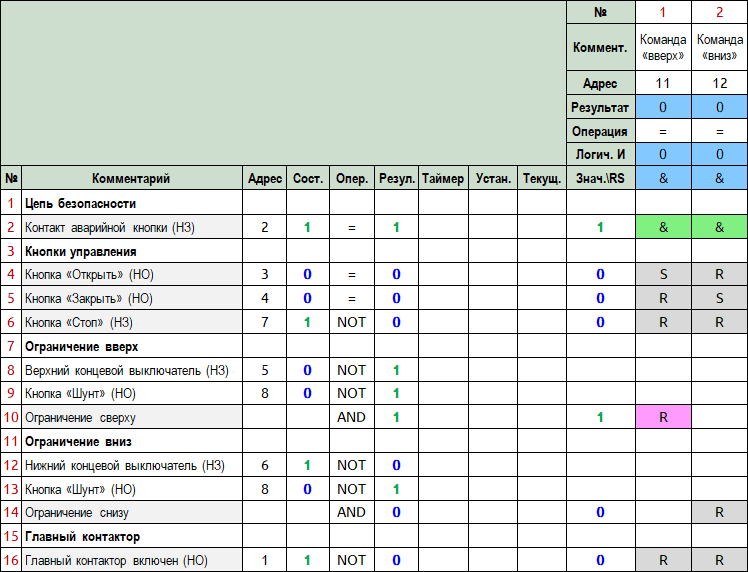 Рис. 19. Использование логических операций над входными переменными в программе управления шлагбаумом
Рис. 19. Использование логических операций над входными переменными в программе управления шлагбаумом
Для того чтобы ввести в программу управления шлагбаумом кнопку «Шунт», используется логическая операция «И». Так как двигатель остановлен срабатыванием верхнего концевого выключателя, сбросившего ячейку «RS» в первом столбце, с помощью триггерной ячейки «R» в строке 10, то для обхода концевого выключателя и продолжения движения необходимо отменить сброс, переведя триггерную ячейку «R» в строке 10 в ноль. Это можно сделать нажатием на кнопку «Шунт», при котором аргумент операции «логическое И» в строке 9 станет нолем и будет в этом состоянии, пока кнопка «Шунт» остается нажатой. Нулевой результат входной операции в строке 9 сделает результат в строке 10 равным нолю и отменит сброс. Так как кнопка «Шунт» нормально открытая и при нажатии дает единицу, а для блокировки сигнала конечного выключателя нужен ноль, то сигнал от кнопки «Шунт» необходимо инвертировать. Логическое И инвертированных сигналов от конечного выключателя и кнопки «Шунт» через триггерную ячейку «R» будет сбрасывать ячейку «RS» команды пуска двигателя при достижении стрелой конечного положения, а нажатие на кнопку «Шунт» будет блокировать сброс. Таким образом, при удержании кнопки «Шунт» нажатием на кнопку «Открыть» можно поднять стрелу выше верхнего концевого выключателя. Табличная программа в момент обхода верхнего концевого выключателя показана на рис. 20.
 Рис. 20. Обход верхнего концевого выключателя нажатием на кнопку «Шунт»
Рис. 20. Обход верхнего концевого выключателя нажатием на кнопку «Шунт»
В таком виде программа в таблице хорошо читается, имеет несложный алгоритм, позволяет контролировать входные сигналы контроллера и цепи формирования выходных сигналов и может быть использована на реальном объекте. Но мы продолжим вносить в программу изменения — даже не столько для улучшения ее алгоритма, сколько для того, чтобы показать возможности табличного программирования контроллеров.
2.5. Применение таймера с задержкой на включение
Немного усложним алгоритм работы шлагбаума. Подъем и опускание стрелы шлагбаума происходит за определенное время. Следовательно, если стрела шлагбаума начала движение из нижнего положения, то через время, необходимое для подъема стрелы, мы ожидаем срабатывания верхнего концевого выключателя. Если за отведенное для подъема время сигнал от концевого выключателя не был получен, то мы можем говорить либо о неисправности шлагбаума, либо о повышенной нагрузке на механизм подъема. В таком случае требуется вмешательство специалиста. Добавим к программе управления шлагбаумом возможность контролировать время выполнения операции. Для этого в качестве входных данных используем значения выходных переменных «команда „вверх“» и «команда „вниз“», управляющих двигателем шлагбаума. Время операции будем контролировать таймером с задержкой на включение TON. В таблице на рис. 21 выходное значение таймера в строке 18 станет равным единице только в том случае, если сигнал на входе таймера продержится равным единице больше установленного времени. То есть если при подъеме стрелы шлагбаума двигатель остается включенным больше 8 секунд, то на выходном контакте 13 установится логическая единица. Рис. 21. Использование таймеров в программе управления шлагбаумом
Рис. 21. Использование таймеров в программе управления шлагбаумом
Этим сигналом можно включить индикатор «Авария» или звуковой сигнал. Чтобы не усложнять программу, не будем вводить дополнительную кнопку квитирования аварий. Для сброса аварии применим кнопку «Стоп», которая подключена к контакту номер 7. При возникновении аварийной ситуации нажатие на кнопку «Стоп» квитирует аварию и отключает, к примеру, звуковой сигнал. Однако при этом произойдет сброс ячеек «RS» в первых двух столбцах и будет потеряна информация о направлении движения шлагбаума, в котором возникла аварийная ситуация. Это несколько усложнит задачу сервисной службы найти причину, по которой стрела шлагбаума не может подняться или опуститься за заданное время. Состояние программы в аварийной ситуации представлено на рис. 21, из которого можно увидеть, что вышло время операции «поднять шлагбаум». Стрела шлагбаума находится между верхним и нижним конечными положениями. Силовое питание включено, кнопка «Открыть» нажата и отпущена. Сформирована команда «вверх». Таймер в строке 18 установил на своем выходе логическую единицу. За 8 секунд стрела шлагбаума не дошла до верхнего концевого выключателя.
Выбор времени таймеров, с помощью которых контролируется время открытия и закрытия шлагбаума, производится во время пусконаладочных работ. Если во время эксплуатации установленного времени недостаточно для выполнения операции, то это может быть следствием отсутствия смазки или обледенения механизмов, электрической или механической поломки, а также удержания стрелы каким-либо препятствием. Чтобы не повредить двигатель шлагбаума при перегрузке, добавим в программу еще одну строку — для автоматического отключения команд «вверх» и «вниз» при возникновении аварийной ситуации. Табличная программа с добавленной строкой 20 представлена на рис. 22. Теперь при возникновении аварийной ситуации двигатель шлагбаума остановится и оператор будет уведомлен об аварии, например, звуковым сигналом. Отключается звуковое оповещение нажатием на кнопку «Стоп».
 Рис. 22. Табличная программа управления шлагбаумом с аварийной блокировкой пуска
Рис. 22. Табличная программа управления шлагбаумом с аварийной блокировкой пуска
Рассмотрим способ блокировки подробнее. В случае, показанном на рис. 22, при возникновении аварийной ситуации команды управления двигателем не сбрасываются, а блокируются. Результат логического И по столбцу будет равен нолю не из-за сброса ячейки «RS» в столбце, а по причине нулевого состояния активных ячеек в строке 20. Можно отключать команды «вверх» и «вниз» по-другому, заменив в строке 20 операцию инверсии на «=» и переведя активные ячейки в триггерные активные ячейки типа R. При возникновении аварии двигатель также будет отключен. Только в этом случае при аварийной остановке двигателя потеряется ценная информация о направлении движения стрелы шлагбаума перед аварией. Если помеха движению стрелы может быть устранена без привлечения специалистов сервисной службы, то нажатие на кнопку «Стоп» квитирует аварию и восстанавливает работоспособность шлагбаума.
2.6. Применение таймера, формирующего импульс
Дальнейшие изменения программы управления шлагбаумом в основном будут предназначены для демонстрации возможностей табличного программирования. Помимо ситуаций, которые возникают при штатной работе оборудования, стоит продумать реакцию системы управления на аварийные ситуации. Добавим еще одно улучшение. Сформируем звуковой сигнал заданной длительности, оповещающий об аварии. В таблице на рис. 22 к выходу 13 контроллера, который отвечает за индикацию аварийной ситуации, подключены световой и звуковой сигналы. При аварии звуковой сигнал будет включен до тех пор, пока оператор не нажмет кнопку «Стоп». Это не всегда удобно, так как вместе с отключением звукового сигнала отключается и световая индикация, которая могла быть подтверждением факта аварийной остановки. Для того чтобы разделить световую и звуковую сигнализации добавим в программу выходную переменную «авария, звук» (рис. 23). Для ограничения длительности звукового сигнала используем таймер, формирующий импульс, TP. Установим длительность звукового сигнала в 2 секунды. Теперь при возникновении аварийной ситуации пуск двигателя будет заблокирован, раздастся короткий звуковой сигнал, индикаторная лампа «Авария» будет гореть до нажатия на кнопку «Стоп». На рис. 23 показано состояние программы, когда вышло время операции «открыть шлагбаум». Стрела не достигла своего верхнего положения за 8 секунд. Звуковой сигнал включен — и будет отключен через 0,845 секунды.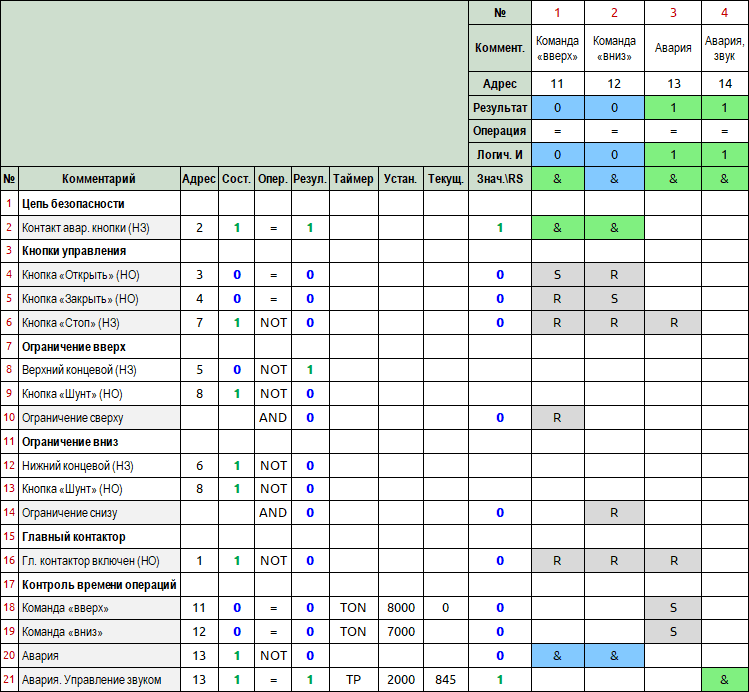 Рис. 23. Табличная программа управления шлагбаумом с ограничением длительности аварийного звукового сигнала
Рис. 23. Табличная программа управления шлагбаумом с ограничением длительности аварийного звукового сигнала
2.7. Управление скоростью
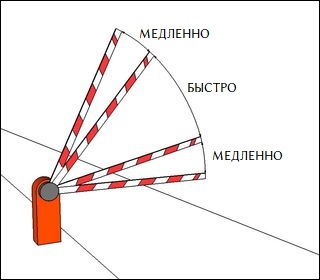 Многие современные шлагбаумы замедляют движение стрелы возле конечных положений. Такое решение делает работу шлагбаума плавной, уменьшает износ деталей, повышает безопасность эксплуатации. Находящиеся рядом со шлагбаумом люди могут успеть среагировать на начало движения. При этом время открывания шлагбаума может даже сократиться. Замедление во время пуска и останова будет компенсировано прохождением средней зоны с повышенной скоростью.
Многие современные шлагбаумы замедляют движение стрелы возле конечных положений. Такое решение делает работу шлагбаума плавной, уменьшает износ деталей, повышает безопасность эксплуатации. Находящиеся рядом со шлагбаумом люди могут успеть среагировать на начало движения. При этом время открывания шлагбаума может даже сократиться. Замедление во время пуска и останова будет компенсировано прохождением средней зоны с повышенной скоростью.
 Чтобы реализовать замедление при подходе к конечным положениям, введем в схему предварительные верхний и нижний выключатели. Программа управления шлагбаумом с предварительными выключателями показана на рис. 24. Эти выключатели должны срабатывать до конечных выключателей. Теперь мы имеем три сектора движения стрелы: нижний сектор разгона или торможения, средний сектор движения стрелы с высокой скоростью, верхний сектор торможения или разгона.
Чтобы реализовать замедление при подходе к конечным положениям, введем в схему предварительные верхний и нижний выключатели. Программа управления шлагбаумом с предварительными выключателями показана на рис. 24. Эти выключатели должны срабатывать до конечных выключателей. Теперь мы имеем три сектора движения стрелы: нижний сектор разгона или торможения, средний сектор движения стрелы с высокой скоростью, верхний сектор торможения или разгона.
 Рис. 24. Табличная программа управления шлагбаумом с предварительными выключателями
Рис. 24. Табличная программа управления шлагбаумом с предварительными выключателями
При подъеме вверх стрела шлагбаума начинает медленное движение от своего нижнего положения до нижнего предварительного выключателя. По прохождении нижнего предварительного выключателя включается повышенная скорость и стрела с высокой скоростью движется до верхнего предварительного выключателя. Потом повышенная скорость отключается и стрела медленно подходит к своему верхнему положению. Для реализации режима работы шлагбаума с изменением скорости движения стрелы необходимо ввести в программу две входные переменные, отражающие состояние предварительных выключателей, и одну выходную переменную, которая будет включать повышенную скорость. Обозначим ее как «2-я скорость». В таблице, представленной на рис. 24, отображено состояние шлагбаума после нажатия кнопки «Открыть». В этот момент команда «вверх» запустит двигатель стрелы шлагбаума на пониженной скорости. На ограничение скорости будет влиять ноль в строке 13 от сработавшего нижнего предварительного выключателя. После прохождения нижнего предварительного выключателя значение в строке 13 станет равным единице, активная ячейка в этой строке тоже станет равной единице. Следовательно, логическое И по пятому столбцу и выходная переменная «2-я скорость» также будут равны единице. Стрела шлагбаума начнет двигаться с повышенной скоростью до верхнего предварительного выключателя. Далее, при срабатывании верхнего предварительного выключателя, произойдет замедление. Из таблицы видно, что на отключение высокой скорости влияют три активные ячейки в пятом столбце. Состояние одной из них, в строке 10, зависит от кнопки «Шунт». Сделано это для того, чтобы при необходимости обойти концевые выключатели движение стрелы происходило на пониженной скорости.
2.8. Итог
Используя как пример задачу управления шлагбаумом, мы построили табличную программу, в которой реализовали алгоритм управления реальным объектом. Простой алгоритм занимал всего 7 строк. С дополнительными функциями контроля времени исполнения операций программа занимает 23 строки, из которых 6 — это заголовки, не имеющие ни данных, ни логических операций. При этом таблица не потеряла своей наглядности. В ней ясно отображаются значения входных и выходных переменных, внутренние цепи формирования сигналов. Видна работа таймеров. Просто и понятно производится предварительная обработка входных значений. При необходимости выходные значения могут быть инвертированы. Но это не все положительные качества табличного программирования контроллеров. Мы имеем не просто таблицу, а практически комплект документации. Распечатка программы умещается на один лист инструкции по эксплуатации и даже может быть напечатана на корпусе устройства. В случае потери файла с программой управления табличного контроллера ее можно ввести с клавиатуры за короткое время. Назначение входов и выходов нетрудно определить из таблицы. В случае отсутствия в системе монитора работу программы можно наблюдать на любом компьютере или смартфоне. Специалист, знакомый с табличным программированием, может определить неисправность дистанционно, по фотографии таблицы, причем не имея инструкции по эксплуатации или других документов. Программы в таблице может быть достаточно для подключения сигнальных проводов к контроллеру, так как номера контактов находятся в столбце «Адрес», а назначения входов и выходов — в столбце «Комментарий». Использование табличного программирования контроллеров не только упростит поиск неисправностей, но также снизит оговоренные ранее риски, связанные с эксплуатацией систем с закрытым программным кодом или требующих использования компьютера с установленной на нем средой разработки.3. Табличное программирование. Особенности
3.1. Формат файла программы
Одно из требований, предъявляемых к формату файла табличной программы, — это возможность просмотра содержимого в любом текстовом редакторе. Поэтому для сохранения таблицы был выбран текстовый файл, в котором строки, содержащие данные таблицы, состоят из полей, отделяющихся друг от друга знаком табуляции (рис. 25). Конечно, в таком виде таблицу редактировать неудобно, поэтому текстовый формат рассматривался только как самый простой способ сохранения содержимого таблицы. Рис. 25. Формат текстового файла табличной программы:
\t — символ табуляции, \r — символ перевода каретки, \n — символ перевода строки
Рис. 25. Формат текстового файла табличной программы:
\t — символ табуляции, \r — символ перевода каретки, \n — символ перевода строки
Для редактирования и отладки программ, организованных в виде таблиц, была написана специальная программа[3]. Чтобы не зависеть от конкретной операционной системы, эта программа была написана на языке JavaScript и может запускаться офлайн в любом современном браузере. По сути, это HTML-файл размером немногим более 100 килобайт. Безусловно, возможны и другие реализации, так как формат файла таблицы полностью открыт, а алгоритм пересчета таблицы несложен. Редактирование таблицы в окне браузера не вызывает каких-либо трудностей, все функции интуитивно понятны человеку, работавшему в любой электронной таблице. От обычных приложений в такой реализации отличается только метод сохранения файла. Из окна браузера файл можно только выгрузить в папку «Загрузки» или другую папку, для этого назначенную. Поэтому при сохранении изменений файл не перезаписывается, а сохраняется как дополнительная копия. Так как файлы таблиц небольшого размера, то хранение нескольких последовательно сохраненных файлов дает возможность контролировать ход редактирования и при необходимости возвращаться на необходимое число шагов назад. Недостаток такого метода сохранения файла в том, что периодически необходимо удалять ненужные копии. Рассмотрим структуру файла таблицы. Каждая строка файла разделена на поля символом табуляции. Как и у любого текстового файла Windows, строка оканчивается возвратом каретки (\r) и переводом строки (\n). Первая строка текстового файла табличной программы представлена на рис. 26 — это заголовок всей таблицы.
 Рис. 26. Первая строка текстового файла табличной программы
Рис. 26. Первая строка текстового файла табличной программы
Первое поле содержит выражение «строк — столбцов — активных ячеек — >» и введено для того, чтобы проверить, соответствует ли содержимое файла табличной программе. Если текстовый файл начинается с другой фразы, то это не табличная программа. Далее идут поля с набором чисел 42, 5, 33 — это количество строк, столбцов и активных ячеек таблицы. Следующее поле — это имя файла длиной до 32 символов. В нашем случае имя файла — «проба_01.txt». Первое число после имени файла отвечает за адреса битовых переменных. Второе число отвечает за адреса аналоговых переменных. В данном случае битовые переменные имеют адреса с 1 по 99. Для аналоговых переменных выделены адреса со 100 по 140. При этом не учитывается, какие из переменных входные, а какие выходные или внутренние. Нумерация входов и выходов контроллера, а также распределение переменных по адресам будут зависеть от реализации самого контроллера. Одним из решений может быть назначение адресов входных и выходных переменных равными соответствующим номерам контактов на разъеме контроллера. Тогда табличной программой можно воспользоваться как списком сигналов, подключенных к разъемам контроллера. На рис. 27 представлена вторая строка рассматриваемого текстового файла. Это заголовок раздела с информацией о содержимом входных строк табличной программы. Заголовок не только помогает понять, что и в каком поле находится, но и является атрибутом начала считывания содержимого таблицы. Еще по нему можно определить, что идет чтение файла табличной программы, а не другого текстового файла. В нашем примере следующие 42 строки текстового файла будут содержать данные о 42 входных строках таблицы.
 Рис. 27. Вторая строка текстового файла табличной программы
Рис. 27. Вторая строка текстового файла табличной программы
Рассмотрим назначение полей строки. Первое поле с названием «Комментарий строки» содержит комментарий к данной строке. Это может быть имя переменной, описание назначения входа или что-то другое. В пересчете таблицы поле комментария не участвует. Второе поле, «Адрес входной», — это, собственно, адрес переменной, по которому к этой переменной обращаются. Несмотря на то что тип переменной можно определить, используя данные об адресах переменных в первой строке файла, следующее поле, «Тип входной», определяет, является ли переменная битовой или аналоговой или же это указатель. Поле «Начальное значение» соответствует своему названию и содержит значение, которое подставляется в ячейку при первом пересчете таблицы. Если значение в поле «Тип входной» будет определяться как указатель, то поле «Начальное значение», будет содержать номер одной из строк, результат которой используется в данной строке. Следующие два поля, «Код операции» и «Тип результата», определяют операцию над входными переменными и тип получаемого результата. Так как в текстовый файл таблицы легко могут быть внесены изменения, то для контроля соответствия между типом входных данных, типом результата и применяемой операцией введены поля, которые могут показаться избыточными. Дополнительные поля типов помогают быстро найти ошибки в случае некорректных изменений в текстовом файле таблицы. Поле «Таймер» содержит код таймера. Если это поле равно нолю, то результат входной операции может быть использован в активных ячейках без задержки. В поле «Уставка» записывается время работы таймера в миллисекундах. Пример входной строки табличной программы, содержащей только комментарий, представлен на рис. 28.
 Рис. 28. Пример записи данных строки табличной программы в текстовом виде
Рис. 28. Пример записи данных строки табличной программы в текстовом виде
Следующий раздел файла содержит данные о выходных переменных. Номер первой строки раздела в текстовом файле можно получить, прибавив к числу во втором поле заголовка файла число 2. Это количество строк таблицы плюс две первые строки с заголовками. Первая строка раздела представлена на рис. 29. Это заголовок столбцов табличной программы.
 Рис. 29. Заголовок раздела с данными столбцов табличной программы
Рис. 29. Заголовок раздела с данными столбцов табличной программы
Далее идут строки файла, в которых находится информация о выходных переменных и операциях над ними. Пример такой строки — на рис. 30.
 Рис. 30. Пример записи данных столбца табличной программы в текстовом виде
Рис. 30. Пример записи данных столбца табличной программы в текстовом виде
В первом поле «Комментарий столбца» записан комментарий к выходной переменной, который может содержать произвольную информацию. Следующее за ним поле «Адрес выходной» содержит адрес выходной переменной, которой будет присвоено значение, получаемое при пересчете столбца таблицы. Далее идет поле «Тип выходной» с типом выходной переменной, которая может быть битовой или аналоговой. Поле «Код операции» содержит код операции над результатом по столбцу перед присвоением значения выходной переменной. Количество строк файла, содержащих данные о выходных переменных, указано в третьем поле заголовка файла. После этих строк идет раздел с данными активных ячеек таблицы. Раздел начинается с заголовка (рис. 31), после которого идут строки файла, содержащие по три поля.
 Рис. 31. Заголовок раздела с данными активных ячеек табличной программы
Рис. 31. Заголовок раздела с данными активных ячеек табличной программы
Первое поле, «Строка», содержит номер строки таблицы, поле «Столбец» — номер столбца таблицы, а поле «Код операции» указывает, какое действие будет произведено при пересчете таблицы. Пример записи данных активной ячейки — на рис. 32.
 Рис. 32. Пример записи данных активной ячейки табличной программы в текстовом виде
Рис. 32. Пример записи данных активной ячейки табличной программы в текстовом виде
Другими словами, в полях «Строка» и «Столбец» указано положение активной ячейки в таблице, а поле «Код операции» определяет, каким образом активная ячейка будет влиять на результат по столбцу.
3.2. Аналоговые переменные
Для обработки аналоговых сигналов, например от датчиков температуры, давления, уровня жидкости и других подобных измерителей, контроллеру необходимо иметь аналоговые входы. Получаемые от аналоговых датчиков данные и значения их пределов присваиваются аналоговым переменным, которые обычно представлены числами с плавающей запятой. Эти переменные обрабатываются с помощью математических операций, результаты которых могут поступать как на дискретные, так и на аналоговые выходы контроллера. Например, результат операции сравнения будет представлен в дискретном виде, а результат умножения — в аналоговом. Диапазон адресов аналоговых переменных, применяемых в табличной программе, находится в заголовке текстового файла табличной программы. По предпоследней и последней цифрам в заголовке можно определить адреса возможных аналоговых переменных. На конец адресного пространства битовых переменных указывает предпоследняя цифра в заголовке. Прибавив к этой цифре единицу, мы получим начало диапазона адресов аналоговых переменных. Последняя цифра заголовка указывает на конец адресного пространства аналоговых переменных. Так как все возможные адреса аналоговых переменных известны, то тип переменой легко определить по ее адресу. Полученное при помощи операций над входными переменными аналоговое значение может быть присвоено выходной аналоговой переменной. Какие из аналоговых переменных будут входными, какие выходными, а какие внутренними — зависит от используемого контроллера. Чтобы вычисленное значение было присвоено выходной переменной, необходимо на пересечении строки с аналоговым значением и столбца с интересующей нас выходной переменной вставить аналоговую активную ячейку. Такую ячейку мы будем обозначать символом «А». Пример использования аналоговых переменных в табличной программе — на рис. 33.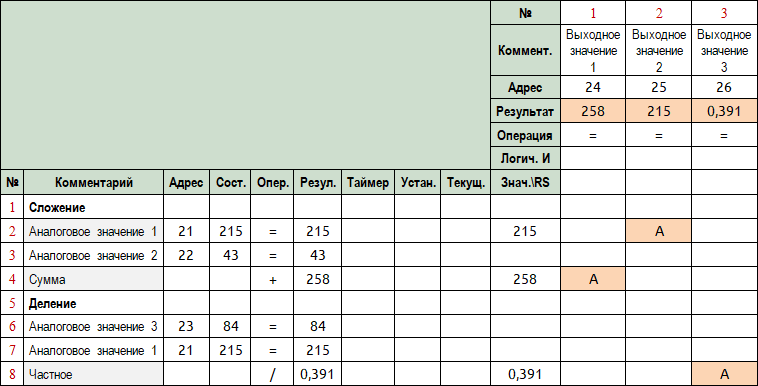 Рис. 33. Пример операции с аналоговыми переменными
Рис. 33. Пример операции с аналоговыми переменными
Использование аналоговых переменных в таблице подчиняется определенному правилу. Для аналоговых входных и выходных переменных используется только операция присвоения «=». Операция «NOT», инвертирующая битовые входные и выходные значения, для аналоговых операций не применяется. При необходимости для того, чтобы получить отрицательное значение переменной, можно воспользоваться умножением на отрицательное число. Если в столбце под аналоговой переменной находятся несколько ячеек с символом «А» или активные ячейки битовых операций, то при проверке таблицы или ее пересчете должна быть выдана соответствующая ошибка. Таким образом, в столбце аналоговой выходной переменной может быть только одна аналоговая активная ячейка, при помощи которой результат по строке присваивается выходной переменной. Также в строке с аналоговым результатом не используется таймер. Для улучшения читаемости таблицы ячейки с символом «А» и значения выходных переменных выделяются бежевым цветом, а в ячейках битовых операций «Логич. И» и «RS» ничего не пишется. Различные уставки и граничные значения для аналоговых сигналов присваиваются внутренним аналоговым переменным, для которых не назначены аналоговые входы контроллера. При загрузке таблицы таким внутренним переменным присваивается число, которое записано в поле «Начальное значение» текстового файла таблицы. При необходимости внутреннюю переменную можно изменить, присвоив ей новое значение. Для этого при помощи входных операций определяется новое значение и присваивается внутренней переменной с помощью активной аналоговой ячейки.
3.3. Аналоговые входы для датчиков температуры
Некоторые задачи управления, решаемые с помощью контроллеров, требуют измерения температуры. Для этого в контроллерах предусматриваются входы подключения датчиков температуры. В табличной программе таким входам соответствуют аналоговые переменные с назначенными для этого адресами. Программа пересчета таблицы считывает значение с аналого-цифрового преобразователя, подключенного к датчику, и преобразует его в температуру. В ячейке состояния входной переменной будет стоять привычное значение температуры, а не целочисленное значение, полученное от аналого-цифрового преобразователя. При проектировании систем управления с использованием табличных контроллеров не стоит нагружать табличную программу объемными математическими вычислениями. И это не из-за того, что контроллер не справится или табличные программы непригодны для вычислений. Большое количество вычислений может сделать таблицу громоздкой и затруднит обслуживание устройства во время эксплуатации. Низкая цена и высокая производительность современных контроллеров позволяют обрабатывать входные сигналы от датчиков в реальном времени и передавать готовые данные на головной контроллер с помощью скоростных последовательных интерфейсов. Разделение задач управления и первичной обработки данных повышает надежность системы, упрощает алгоритм управляющей программы, улучшает восприятие графической информации о состоянии системы. На вспомогательные контроллеры обработки сигналов возлагается только преобразование физических величин в привычные числовые значения. Задача по принятию решений в зависимости от получаемых данных остается за программой головного контроллера. Если по каким-то причинам необходимо принимать решение во вспомогательном контроллере, то вместе с обработанным значением сигнала в основную программу должна быть передана информация о принятом вспомогательным контроллером решении.3.4. Сохранение переменных в энергонезависимой памяти
Нередко при работе программы возникает необходимость сохранять в энергонезависимой памяти переменные, отвечающие за текущее состояние системы. Для этого в контроллерах предусматриваются блоки энергонезависимой памяти, сохраняющей записанные в нее данные после отключения питания. Для табличной программы это обычные внутренние переменные, значение которых изменяется только с помощью активных ячеек. Обращение к сохраняемым переменным не отличается от обращения к обычным переменным. Достаточно определить адреса для битовых и аналоговых переменных, значения которых нужно сохранять, чтобы системная программа записывала их в специальный раздел памяти. Программа пересчета таблицы после подачи на контроллер питания не присваивает сохраняемой переменной начальное значение из файла таблицы. В момент загрузки такие переменные получают значения, сохраненные в энергонезависимой памяти. Чтобы присвоить начальные значения переменным, сохраняемым в энергонезависимой памяти, в программе следует предусмотреть для них режим инициализации. Для этого каждой такой переменной добавляется обычная внутренняя переменная, которая при загрузке получит начальное значение и будет оставаться неизменной во время выполнения программы. При необходимости инициализировать переменную, сохраняемую в энергонезависимой памяти, можно в любой момент присвоить ей значение добавленной переменной. Пример реализации такого алгоритма показан на рис. 34. В режиме инициализации сохраняемая переменная получит начальное значение от соответствующей внутренней переменной.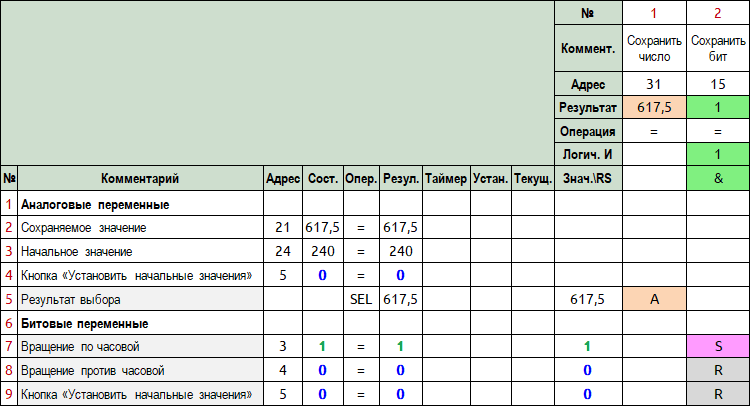 Рис. 34. Пример организации сохранения в энергонезависимой памяти значений аналоговой и битовой переменных
Рис. 34. Пример организации сохранения в энергонезависимой памяти значений аналоговой и битовой переменных
Можно заметить, что при отпускании кнопки, устанавливающей начальные значения, сохраняемая переменная с адресом 31 получит значение переменной с адресом 21. То есть начальное значение переменная с адресом 31 будет иметь, только пока нажата кнопка. На рис. 34. представлено состояние табличной программы, когда кнопка, устанавливающая начальные значения, не нажата. Если переменная с адресом 21 отображает состояние одного из аналоговых входов, то присвоение ей начального значения не имеет особого смысла. Но если это вычисляемая переменная и в ее расчетах участвует переменная с адресом 31, то за время, пока кнопка нажата, программа пересчета таблицы сделает большое количество циклов и обновит значение переменной с адресом 21. После отпускания кнопки обновленное значение запишется в сохраняемую переменную. Для битовой переменной с адресом 15, сохраняемой в энергонезависимой памяти, начальное значение равно нолю и в программе соответствует вращению против часовой стрелки. В примере на рис. 35 начальное значение битовой переменной с адресом 15 устанавливается триггерной активной ячейкой в строке 9. Предполагаемое начальное значение этой переменной равно нолю, поэтому выбрана триггерная ячейка «R», которая сбросит в ноль сохраняемую битовую переменную при нажатии на кнопку, устанавливающую начальные значения.
 Рис. 35. Пример присвоения начальных значений переменным, сохраняемым в энергонезависимой памяти
Рис. 35. Пример присвоения начальных значений переменным, сохраняемым в энергонезависимой памяти
В зависимости от задачи возможны различные варианты установки начальных значений для переменных, сохраняемых в энергонезависимой памяти.
3.5. Операции над входными данными
Входные данные могут считываться с входов контроллера, на котором работает табличная программа, или поступать по внутренней связи от вспомогательных контроллеров первичной обработки сигналов, а также быть полученными удаленно от других контроллеров. Вне зависимости от источника данных входные переменные можно разделить на два основных типа: битовые и аналоговые. Битовые переменные могут принимать только два значения: ноль и единица. Аналоговые переменные необходимы для описания аналоговых сигналов и, по сути, являются числами с плавающей десятичной точкой. Чтобы не перегружать таблицу активными ячейками и улучшить восприятие информации о состоянии управляющей программы, над входными переменными производятся арифметические и логические операции. Битовые операции над входными переменными позволяют уменьшить количество активных ячеек, присваивая последним не значения входных переменных, а сигналы состояний, получаемые в результате логических операций над несколькими входными переменными. С помощью операций с аналоговыми переменными производятся необходимые вычисления для установки аналоговых значений на выходах контроллера или принятия управляющих решений. Так как мы имеем два типа переменных, то результат операций также будет либо битовым, либо аналоговым. Результат арифметической операции двух аналоговых переменных будет аналоговым. А результат сравнения этих же аналоговых переменных будет битовым. Битовый результат сравнения аналоговых переменных может поступать на вход таймера и после срабатывания таймера изменять состояние активных ячеек. Также битовый результат может участвовать в других битовых операциях. Аналоговый результат может только переписаться на выход без изменения. Входные операции могут иметь от одного до трех операндов. Для операций присвоения, инверсии и синхронизации требуется один операнд (рис. 36). Битовые входные переменные при необходимости могут быть инвертированы и уже в таком виде использоваться в качестве аргумента.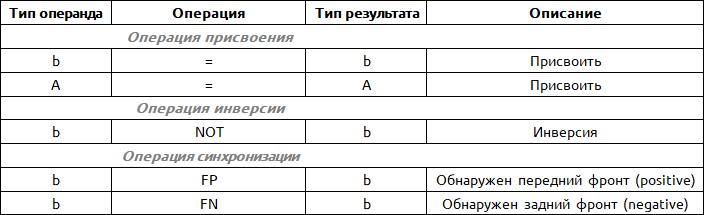 Рис. 36. Операции с одним операндом:
A — обозначение аналогового типа, b — обозначение битового типа
Рис. 36. Операции с одним операндом:
A — обозначение аналогового типа, b — обозначение битового типа
Операциям присвоения и инверсии требуется одна строка (рис. 37), операциям синхронизации — две (рис. 38). На первой строке для операции синхронизации формируется сигнал, передний или задний фронт которого необходимо обнаружить. На строке ниже записывается операция синхронизации и вычисляется результат. Примеры операций синхронизации показаны на рис. 38. Результат текущего пересчета таблицы обозначим как b1a, а как b0 — результат предыдущего. Если предыдущее значение операнда было ноль, а текущее значение — единица, то программа пересчета таблицы фиксирует переход из ноля в единицу — передний фронт. Если был переход из единицы в ноль, то это задний фронт. При обнаружении фронта сигнала результату операции синхронизации будет присвоена единица, которая продержится всего один цикл пересчета таблицы, после чего результат операции синхронизации вернется в ноль. В течение одного цикла единица на выходе операции синхронизации может запустить таймер, сбросить или установить значение в триггерной ячейке, изменить результат логического И по столбцу.
 Рис. 37. Однострочные битовые операции:
а) присвоение; б) инверсия
Рис. 37. Однострочные битовые операции:
а) присвоение; б) инверсия
 Рис. 38. Пример обнаружения фронта сигнала:
а) переднего фронта; б) заднего фронта
Рис. 38. Пример обнаружения фронта сигнала:
а) переднего фронта; б) заднего фронта
Аналоговая операция присвоения устанавливает результат, равный входному значению переменной (рис. 39).
 Рис. 39. Аналоговая операция присвоения
Рис. 39. Аналоговая операция присвоения
Битовым логическим операциям, операциям сравнения аналоговых переменных и арифметическим операциям требуется два операнда, один из которых находится в предыдущей строке, а другой — в строке выше предыдущей. Всего для этих операций требуется три строки. Представленный в таблице на рис. 40 базовый набор операций может быть дополнен другими математическими операциями. Написание тестовых программ для различного оборудования показало, что для большинства применений достаточно использования базового набора. При необходимости сложных расчетов значений от датчиков лучше применить дополнительные контроллеры первичной обработки сигналов — для того, чтобы не усложнять логику управляющей программы.
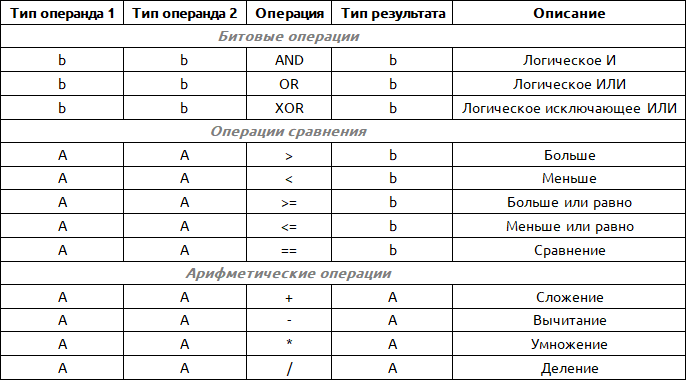 Рис. 40. Операции с двумя операндами:
A — обозначение аналогового типа, b — обозначение битового типа
Рис. 40. Операции с двумя операндами:
A — обозначение аналогового типа, b — обозначение битового типа
Ход выполнения операции с двумя битовыми операндами можно рассмотреть на примере логического И. На рис. 41 представлен ход выполнения такой операции. Так как программа пересчета таблицы проходит по строкам сверху вниз, то сначала будет вычислен первый операнд, b1a. Его значение будет зависеть от состояния переменной b1 и от необходимости ее инвертировать. Если переменную b1 необходимо инвертировать, то b1a получит инвертированное значение b1, а если такой необходимости нет, то b1aстанет равной b1. Аналогичное действие будет проведено с переменной b2. После этого результату b3 будет присвоено значение логического И b1a и b2a.
 Рис. 41. Выполнение операции «логическое И» программой пересчета таблицы:
а) шаг 1 — первому операнду присваивается прямое или инверсное значение; б) шаг 2 — второму операнду присваивается прямое или инверсное значение; в) шаг 3 — вычисляется результат логической операции
Рис. 41. Выполнение операции «логическое И» программой пересчета таблицы:
а) шаг 1 — первому операнду присваивается прямое или инверсное значение; б) шаг 2 — второму операнду присваивается прямое или инверсное значение; в) шаг 3 — вычисляется результат логической операции
Арифметические операции с аналоговым результатом можно рассмотреть на примере сложения (рис. 42). Аналогично производятся операции вычитания, умножения и деления.
 Рис. 42. Операция сложения двух аналоговых переменных
Операции сравнения используют аналоговые операнды и имеют битовый результат, который может далее использоваться в любых битовых операциях. На рис. 43 показана операция «больше» для двух аналоговых переменных. Справа от результата записана эта же операция на текстовом языке программирования.
Рис. 42. Операция сложения двух аналоговых переменных
Операции сравнения используют аналоговые операнды и имеют битовый результат, который может далее использоваться в любых битовых операциях. На рис. 43 показана операция «больше» для двух аналоговых переменных. Справа от результата записана эта же операция на текстовом языке программирования.
 Рис. 43. Пример операции «больше»
Рис. 43. Пример операции «больше»
Операции выбора используют три операнда, два из которых — входные переменные, а третий определяет, значение какой переменной появится на выходе (рис. 44). По сути, это аналоговый или битовый мультиплексоры.
 Рис. 44. Операции выбора с тремя операндами
Рис. 44. Операции выбора с тремя операндами
На рис. 45 показана операция выбора одного из двух битовых значений SELB, в которой все три операнда и результат битовые.
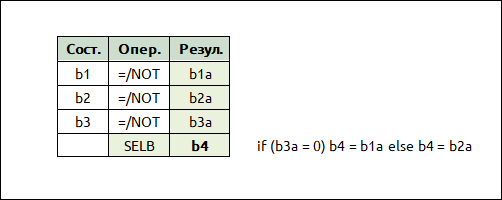 Рис. 45. Пример битового мультиплексора
Рис. 45. Пример битового мультиплексора
Для выбора одного из двух аналоговых значений используется операция SEL, в которой первые два операнда и результат аналоговые, а битовый операнд определяет, какое из входных аналоговых значений будет присвоено результату (рис. 46).
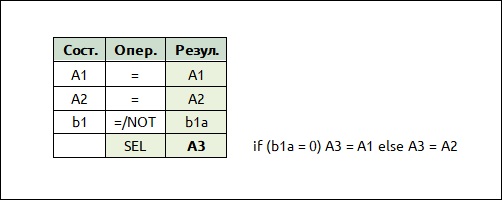 Рис. 46. Пример аналогового мультиплексора
Рис. 46. Пример аналогового мультиплексора
Так как программа пересчета таблицы обрабатывает строки сверху вниз, то с помощью указателя вычисленный результат по строке может быть присвоен любому операнду в строках ниже. Указатель — это номер строки, результат которой может быть использован в битовых и аналоговых операциях других строк. На рис. 47 приведены операции с указателем. Номер одной строки, находящейся выше, результат операции которой уже посчитан, обозначен как «p».
 Рис. 47. Операции с указателем
Рис. 47. Операции с указателем
Тип получаемого операнда будет зависеть от типа результата, на который указывает указатель. Если указатель равен номеру строки с аналоговым результатом, то будет подставлено аналоговое значение. Если результат строки, на которую ссылается указатель, битовый, то будет подставлено битовое значение. Пример использования указателя для аналогового или битового значений показан на рис. 48, где A1 — аналоговый результат входной операции в строке с номером, равным p, а b1 — битовый результат входной операции в строке с номером, равным p.
 Рис. 48. Пример использования указателя
Рис. 48. Пример использования указателя
Использовать указатели следует осторожно, чтобы не усложнить понимание алгоритма табличной программы. Не стоит получать с помощью указателя результат строки со значением входной переменной. Лучше получить то же значение, указав адрес входной переменной. Использовать указатель нужно для сигналов состояний, получаемых в результате нескольких операций над входными переменными. Такой подход позволит уменьшить количество строк и упростит понимание алгоритма табличной программы.
4. Примеры табличного программирования
В разделе 2 рассматривалось поэтапное написание программы управления шлагбаумом. В основном это делалось для того, чтобы показать возможности табличного программирования. В этом разделе будут рассмотрены небольшие части программ, выполняющих задачи, наиболее часто встречающиеся при программировании оборудования. По сути, это программные блоки, из которых собирается общая программа управления устройством. Табличная программа пересчитывается последовательно сверху вниз, строка за строкой, при этом в программе отсутствуют ветвления или переходы. Такое решение облегчает понимание логики работы программы, снижает вероятность возникновения ошибок. Это не новый подход. В графических языках программирования, например в языке релейных схем LD, применяется тот же принцип последовательного прохода по строкам. Применяемые в LD функции больше похожи на наборы строк, которые при необходимости последовательно исполняются для сокращения общего кода, чем на функции или подпрограммы в объектно ориентированных языках программирования. Добавление атрибутов объектно ориентированных языков в графические языки программирования контроллеров, с одной стороны, повышает гибкость графических языков и увеличивает их функциональность, но с другой стороны, усложняет алгоритм, делая его непрозрачным. Методы, применяемые в объектно ориентированных языках, прекрасно работают в них, так как они создавались с учетом особенностей этих языков. Для графических языков необходимо разрабатывать такие методы программирования, которые наилучшим образом будут подходить к решению задач, для которых эти языки разрабатываются. Значит, необходимо определить класс задач, которые будут решать программы, написанные на графических языках. Так как основная задача, выполняемая контроллерами, — это управление различными объектами в режиме реального времени, то лучше использовать параллельные процессы обработки входных данных и организовать между процессами обмен сигналами состояний, а не возлагать все на одну программу, пусть даже исполняемую на мощном вычислительном устройстве. Низкая стоимость контроллеров позволяет получать информацию о процессе в параметрах, которые контролируются, а не в их электрических эквивалентах. Например, температуру от датчиков лучше контролировать в градусах Цельсия, а не в целочисленных значениях с АЦП. Так же и положение механизма можно получать в миллиметрах или градусах, а не в количестве импульсов энкодера. Программы преобразования величин, не принимающие решений по управлению объектом, могут выполняться отдельными микропроцессорами. Они просто преобразуют одни величины в другие — и могут делать это параллельно и независимо как друг от друга, так и от главного контроллера. Полученные конвертированные параметры присваиваются входным переменным и в дальнейшем используются в табличной программе. Если вычислительной мощности контроллера достаточно, то можно назначить некоторые аналоговые входы как входы для подключения датчиков определенного типа. Тогда аналоговые значения, получаемые с этих входов, будут автоматически преобразовываться в необходимый формат. Также можно ввести дополнительные входные операции преобразования значений, получаемых с АЦП, в необходимый вид. Последнее решение более гибкое, так как позволяет использовать любой аналоговый вход для подключения датчиков. При необходимости частого выполнения внутри табличной программы какой-либо дополнительной функции можно добавить в программу пересчета таблицы дополнительную операцию, которая реализует алгоритм функции. В нескольких строках выше новой операции могут находиться аргументы функции. Аналогично построена операция SEL, у которой два аналоговых операнда и один битовый находятся выше строки с результатом. Однако табличную программу не стоит перегружать редко использующимися функциями без особой необходимости. Нужно следить за тем, чтобы не разрушить простоту и понятность алгоритма табличной программы.4.1. Концевой выключатель
Рассмотрим небольшую механическую систему, состоящую из подвижного элемента, движение которого не должно выходить за установленные пределы. Для ограничения движения будем использовать сигнал «разрешение», который, перейдя в состоянии ноль, запретит движение. Введем в таблицу переменные «ограничение слева» и «ограничение справа», которые будут описывать состояния концевых выключателей. Обычно концевые выключатели имеют нормально замкнутый контакт и при срабатывании разрывают электрическую цепь. Это сделано для того, чтобы остановить работу механизма в случае отсутствия контакта в соединениях или при повреждении кабеля от концевого выключателя. Так как в нормальном состоянии цепь конечного выключателя должна быть замкнута, то любое повреждение, разрывающее цепь будет аналогично срабатыванию концевого выключателя и ограничит движение механизма. Рассмотрим пример табличной программы, использующей концевые выключатели. На рис. 49 показано состояние программы, когда концевые выключатели не сработали, их цепи замкнуты, следовательно, ограничений для движения нет. Рис. 49. Пример использования концевых выключателей — разрешено движение в обоих направлениях
Рис. 49. Пример использования концевых выключателей — разрешено движение в обоих направлениях
На рис. 50 показана ситуация, когда сработал правый концевой выключатель и запретил движение вправо. Часто концевые выключатели устанавливают совместно с аварийными концевыми выключателями, при срабатывании которых прекращается любое движение. Если обычные концевые выключатели задают диапазон, в котором механизм может двигаться, то аварийные концевые выключатели ограничивают передвижение в предельно возможных положениях.
 Рис. 50. Пример использования концевых выключателей — запрещено движение вправо
Рис. 50. Пример использования концевых выключателей — запрещено движение вправо
Добавим в табличную программу аварийные концевые выключатели. Ситуация, когда ни концевые выключатели, ни аварийные выключатели не ограничивают движение, показана на рис. 51.
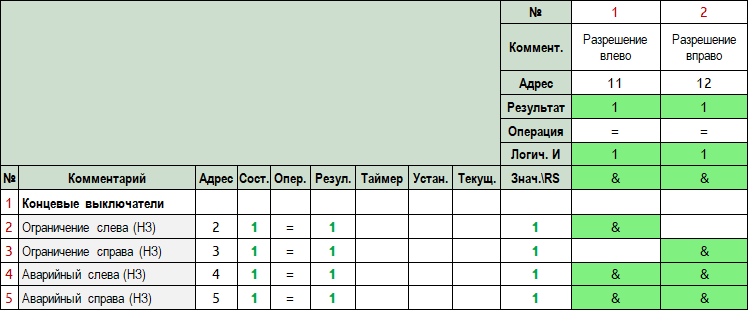 Рис. 51. Пример использования аварийных концевых выключателей — разрешено движение в обоих направлениях
Рис. 51. Пример использования аварийных концевых выключателей — разрешено движение в обоих направлениях
На рис. 52 показана аварийная ситуация, когда сработавшие справа концевой и аварийный выключатели запретили движение в обоих направлениях. Причем правый концевой выключатель запретил движение вправо, а правый аварийный выключатель запретил любое движение.
 Рис. 52. Пример использования аварийных концевых выключателей — аварийная ситуация
Рис. 52. Пример использования аварийных концевых выключателей — аварийная ситуация
4.2. Готовность силового питания
Многие процессы и механизмы требуют для своего функционирования значительных затрат электроэнергии. Обычно питание оборудования разделяют на силовое и контрольное. Первое снабжает электричеством исполнительные механизмы и технологические процессы. Второе питает различные датчики и приборы управления, также такое питание называют цепью управления. Еще можно выделить питание осветительных приборов, подогрев, питание связного оборудования и других вспомогательных систем. Программируемые контроллеры успешно применяются во всех перечисленных системах, но мы рассмотрим применение контроллеров для управления исполнительными механизмами и процессами. Так как подача силового питания приводит в действие исполнительные устройства, работа которых сама по себе может быть небезопасной, то для эксплуатации этих устройств необходима простая и надежная система отключения. Во время работы могут возникать нештатные ситуации, при которых вероятен переход исполнительных механизмов и систем в состояния, не предусмотренные их конструкцией. Поэтому управление включением и отключением силового питания — наиболее важная часть системы безопасности. Использование главного контактора, подающего силовое питание, — хорошее, испытанное временем решение. Напряжение на катушку главного контактора подается через цепь последовательно включенных аварийных кнопок, при нажатии на одну из которых отключается катушка главного контактора и снимается силовое питание. Конечно, есть ситуации, когда внезапное отключение главного контактора может привести к тяжелым последствиям. Например, в последовательной цепи конвейеров отключение одного из них приведет к заваливанию остановившегося конвейера грузом, перемещаемым предыдущим конвейером. Даже если при аварии одновременно будут отключены все конвейеры, то из-за разности скоростей торможения последовательно стоящих конвейеров может произойти заваливание конвейера грузом с предыдущего. Можно привести и другие примеры негативного влияния резкого отключения силового питания. Причем такое отключение может произойти не только от нажатия аварийной кнопки, а, например, из-за аварии на подстанции или в передающих электросетях. Поэтому вопрос безопасного останова механизма или процесса при отключении силового питания должен рассматриваться на стадии их проектирования. И здесь в первую очередь необходимо позаботиться о безопасности людей, а не о возможных экономических потерях. Управление силовым питанием при помощи контроллера — удобное решение, когда оборудование эксплуатируется в штатном режиме и не предполагается резкой остановки оборудования. Но в любом случае должна быть предусмотрена возможность отключения силового питания независимо от работоспособности контроллера. Наиболее простым и безопасным способом подачи силового питания будет такой, при котором контроллер остается только наблюдателем за процессом включения. В цепи включения главного контактора помимо кнопок включения, выключения, аварийных кнопок и датчиков должен быть нормально открытый контакт реле готовности контроллера. Если программа контроллера полностью загрузилась и контроллер может управлять оборудованием в штатном режиме, программа активирует реле готовности контроллера и становится возможным включение главного контактора. То есть при неработающем контроллере главный контактор не включится. Если необходимо программное управление различными электрическими устройствами, то силовое питание после главного контактора подается на так называемые линейные контакторы, питающие отдельные устройства. При таком способе можно из программы управлять силовым питанием отдельных частей оборудования, не вторгаясь в цепи безопасности. На рис. 53 показана программа, выдающая разрешение на включение главного контактора и разрешение на включение питающихся от него систем. Перед подачей питания на исполнительные устройства необходимо убедиться, что ручки управления установлены в безопасное положение и подача питания не приведет к серьезным последствиям. Если ручки управления выключены, то импульс, сформированный по переднему фронту сигнала «цепь управ. 220 В включена», устанавливает в единицу ячейку «RS» в первом столбце и, следовательно, выходную переменную с адресом 11. Данная переменная разрешает включение силового питания и может быть сброшена либо сигналом аварии, либо отключением питания цепи управления. Защита от подачи питания при включенных ручках управления предусмотрена для того, чтобы в момент включения не произошел случайный, непредсказуемый пуск оборудования. Рис. 53. Программа, выдающая разрешение на подачу силового питания, на момент включения
Рис. 53. Программа, выдающая разрешение на подачу силового питания, на момент включения
На рис. 53 показано состояние программы в момент появления на входе контроллера сигнала «цепь управ. 220 В включена». Таймер задержки включения TON в строке 2 только что установил текущее значение времени. Данная задержка нужна для того, чтобы все датчики и приборы в цепи управления успели войти в работу до начала управления оборудованием. В зависимости от применяемых приборов время задержки может быть изменено. Так как главный контактор еще не включен и таймер в строке 2 не установил на своем выходе единицу, то разрешение управления системами отсутствует. На рис. 54 показано состояние этой же программы при включенном силовом питании. Выходной сигнал «разрешение управления системами» формируется двумя активными ячейками в строках 2 и 10. Состояние активной ячейки в строке 2 будет равным единице через 2 секунды после включения цепи управления. Состояние ячейки в строке 10 станет равным единице после включения главного контактора.
 Рис. 54. Программа, выдающая разрешение на подачу силового питания, во включенном состоянии.
Рис. 54. Программа, выдающая разрешение на подачу силового питания, во включенном состоянии.
Если во время работы по какой-то причине пропадает напряжение 220 вольт в цепи управления, то дальнейшая эксплуатация оборудования должна быть прекращена. Состояния различных датчиков, концевых и аварийных выключателей при отсутствии напряжения управления не будут отражать текущие состояния исполнительных механизмов и систем. В таком случае при отключении цепи управления должен отключаться главный контактор и сниматься разрешение управлять системами. На рис. 55 показано состояние табличной программы при пропадании напряжения 220 вольт в цепи управления.
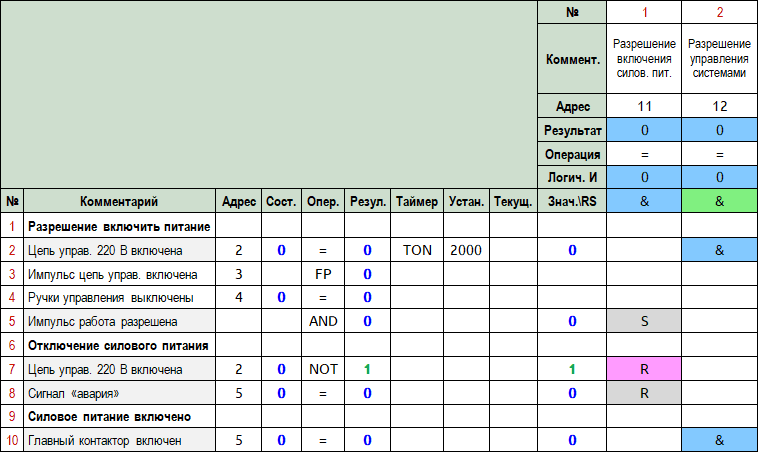 Рис. 55. Программа, выдающая разрешение на подачу силового питания, при пропадании напряжения в цепи управления
Рис. 55. Программа, выдающая разрешение на подачу силового питания, при пропадании напряжения в цепи управления
Данный вариант слежения за силовым питанием показан для примера. На практике алгоритм программы, управляющей питанием, будет зависеть от применяемых схемных решений и может сильно отличаться от приведенного выше. Но независимо от применяемых решений необходимо предусмотреть, чтобы подача силового питания происходила только при наличии сигнала разрешения от контроллера. Такой сигнал должен гарантировать, что программа полностью загружена и находится в состоянии работы.
4.3. Кнопки «Пуск» и «Стоп»
Для управления различными устройствами на производстве часто применяют две кнопки — зеленую для включения оборудования и красную для выключения. Возможны и другие варианты управления включением, но двухкнопочный — самый распространенный. Чтобы реализовать такое управление в табличной программе, для начала необходимо уточнить некоторые особенности двухкнопочного управления. Зеленую кнопку будем называть «Пуск», красную — «Стоп». Кратковременное нажатие на кнопку «Пуск» должно включить оборудование. Причем включение произойдет сразу же, в момент нажатия на кнопку. Возможный вариант включения в момент отпускания кнопки, или по заднему фронту, пока рассматривать не будем. Аналогично и кнопка «Стоп» отключит оборудование в момент ее нажатия. Для обеспечения безопасной эксплуатации оборудования требуется, чтобы кнопки управления обеспечивали отключение при первой необходимости. Поэтому кнопка «Стоп» имеет приоритет над кнопкой «Пуск». Так же и в электрических схемах в целях безопасности предусматривается контроль состояния кнопки «Стоп» и подключающей ее линии. Многие производители кнопок выпускают зеленые кнопки с нормально открытым контактом, а красные кнопки — с нормально замкнутым контактом. Такое решение применяется для того, чтобы обрыв в цепи красной кнопки «Стоп» был равнозначен ее нажатию и удержанию. В этом случае кнопка «Пуск» блокируется и, следовательно, эксплуатация оборудования невозможна. На рис. 56 показаны четыре состояния программы, использующей кнопки «Пуск» и «Стоп». Так как кнопка «Стоп» имеет нормально замкнутый контакт, то значение соответствующей ей переменной с адресом 3 инвертируется. Теперь нажатие на кнопки «Пуск» и «Стоп» одинаково активирует соответствующие этим кнопкам активные триггерные ячейки — «R» для кнопки «Пуск» и «S» для кнопки «Стоп». Причем кнопка «Стоп» имеет приоритет. Если обе кнопки будут нажаты одновременно, то это будет равнозначно нажатию кнопки «Стоп». Программа пересчета таблицы обрабатывает строки сверху вниз. При нажатой кнопке «Пуск» будет установлена активная триггерная ячейка в строке 2, но она не повлияет на результат, так как состояние «R» ячейки первого столбца будет определяться триггерной ячейкой в строке 3, состояние которой зависит от кнопки «Стоп». После подачи питания на контроллер и до тех пор, пока кнопки не были нажаты, ячейка «RS» в первом столбце будет в состоянии «единица», логическое И по столбцу тоже даст единицу (рис. 56, таблица «а»). Чтобы выходная переменная «Включить» с адресом 11 при первом пересчете таблицы после загрузки была равна нолю, используется выходная операция NOT, которая инвертирует результат логического И по столбцу. При нажатии на кнопку «Пуск» ячейка «RS» в первом столбце будет сброшена в ноль и логическое И по столбцу станет равным нолю. Операция инверсии переведет выходную переменную «Включить» в единицу (рис. 56, «б»). После отпускания кнопки «Пуск» ячейка «RS» в первом столбце останется в сброшенном состоянии, при этом переменная «Включить» будет равна единице (рис. 56, «в»). Нажатие на кнопку «Стоп» установит ячейку «RS» в единицу, а операция инверсии переведет выходную переменную «Включить» в ноль (рис. 56, «г»). После отпускания кнопки «Стоп» состояние программы будет таким, как показано в таблице «а» на рис. 56.


 Рис. 56. Использование кнопок «Пуск» и «Стоп» в табличной программе:
а) момент включения контроллера; б) нажата и не отпущена кнопка «Пуск»; в) кнопка «Пуск» отпущена после нажатия; г) нажата и не отпущена кнопка «Стоп»
Рис. 56. Использование кнопок «Пуск» и «Стоп» в табличной программе:
а) момент включения контроллера; б) нажата и не отпущена кнопка «Пуск»; в) кнопка «Пуск» отпущена после нажатия; г) нажата и не отпущена кнопка «Стоп»
Показанная несложная программа двухкнопочного управления разобрана довольно подробно для того, чтобы показать влияние начальных условий на работу блоков программ, использующих триггерные ячейки. Так как после включения контроллера при первом проходе программы пересчета таблицы ячейки «RS» в столбцах имеют значение «единица», то при отсутствии активных ячеек, обозначаемых символом «&», состояние выходной переменной будет определяться только активными ячейками «R» и «S». Первое изменение ячейки «RS» произойдет только после того, как станет единицей значение в строке с триггерной ячейкой «R». На рис. 57 представлена программа, использующая кнопки «Пуск» и «Стоп», в которой при нажатии на кнопку «Пуск» выходная переменная «Включить» становится равной единице не сразу, а только через полсекунды. Если время нажатого состояния кнопки «Пуск» будет меньше полусекунды, то переменная «Включить» останется в ноле.
 Рис. 57. Использование таймера с задержкой на включение для защиты от случайного пуска
Рис. 57. Использование таймера с задержкой на включение для защиты от случайного пуска
4.4. Реверсивное управление
Программируемые логические контроллеры применяются для управления различными исполнительными устройствами, среди которых наиболее распространенными являются электрические двигатели. Помимо простых операций включения и выключения двигателей, контроллеры производят и реверсивное управление электродвигателями, приводящими в движение разные механизмы. Обычно для реверсивного управления трехфазным двигателем применяется схема, состоящая из двух трехфазных контакторов, один из которых подключает двигатель напрямую, а другой меняет очередность фаз, подключаемых к двигателю. Во время работы реверсивные контакторы включаются по одному в зависимости от необходимого направления вращения двигателя. При таком подключении требуется предусмотреть защиту от одновременного включения реверсивных контакторов. Управление пуском двигателя в нужную сторону и защиту от одновременного включения реверсивных контакторов можно реализовать в программе контроллера. Так как при одновременном включении реверсивных контакторов произойдет короткое межфазное замыкание, то дополнительно к программной защите необходимо предусмотреть защиту от одновременного включения контакторов в электрической схеме. Пример программы реверсивного управления двигателем показан на рис. 58. Строки 2 и 3 программы служат для включения реверсивных контакторов, подающих питание на двигатель, а строки 5 и 6 блокируют возможность одновременного включения двух контакторов. При возникновении ситуации, при которой одновременно могут быть поданы два сигнала — «пуск влево» и «пуск вправо», — программа отключит оба контактора. Это отличается от блокировок, применяемых в электрических схемах, где первый включенный контактор блокирует включение другого и будет выключен только снятием напряжения с его катушки.

 Рис. 58. Пример табличной программы реверсивного управления электродвигателем:
а) начальное состояние; б) пуск влево; в) блокировка пуска при одновременной подаче команд «влево» и «вправо»
Рис. 58. Пример табличной программы реверсивного управления электродвигателем:
а) начальное состояние; б) пуск влево; в) блокировка пуска при одновременной подаче команд «влево» и «вправо»
Резкая смена направления вращения двигателя при отключении пуска в одну сторону и одновременном включении пуска в другую сторону в некоторых случаях может спровоцировать ударные механические нагрузки. Чтобы смягчить пуск при резкой смене направления вращения двигателя, введем в строки таблицы, отвечающие за блокировку включения контакторов, таймеры с задержкой включения TON. В этом случае разрешение включить противоположное направление вращения будет дано не сразу, а через некоторое время, необходимое для остановки двигателя. В примере, представленном на рис. 59, это время равно 0,5 секунды. До снятия блокировки пуска вправо осталось 0,35 секунды.
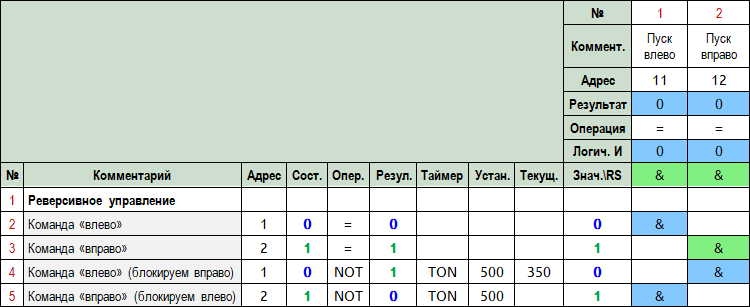 Рис. 59. Использование таймеров в программе реверсивного управления электродвигателем
Рис. 59. Использование таймеров в программе реверсивного управления электродвигателем
4.5. Контроль температуры
Температура различных сред, с которыми взаимодействует оборудование во время работы, а также тепловой режим важных частей оборудования должны находиться под непрерывным контролем управляющей автоматики. Даже в системах, которые при своей работе не изменяют состояния сред, соблюдение теплового режима ответственных элементов значительно продлит время безотказной работы. Программа, контролирующая температуру, может использовать аналоговые значения температур, или дискретные сигналы превышения или снижения температуры относительно заданного значения. Соответственно, для этого могут быть задействованы как аналоговые входы контроллера, так и дискретные. Причем аналоговое значение температуры может быть получено двумя способами: в целочисленном виде при подключении аналоговых датчиков к обычным входам аналого-цифрового преобразователя (АЦП) и в градусах Цельсия при подключении к специальным входам измерения температуры. Специальные входы измерения температуры тоже являются входами АЦП, но, в отличие от обычных аналоговых входов, преобразование полученных от АЦП целочисленных значений в градусы Цельсия производится программой пересчета таблицы. В этом случае в табличной ячейке состояния входа будет записана температура в градусах Цельсия, а не целочисленное значение с АЦП. Подключение температурных датчиков к обычным аналоговым входам потребует либо дополнительной обработки значений в табличной программе, либо использования в расчетах целочисленных значений от аналого-цифрового преобразователя, по которым быстро определить реальное значение температуры достаточно сложно. При любом из этих решений табличная программа потеряет прозрачность, что, в свою очередь, усложнит дальнейшее обслуживание и ремонт оборудования. Использование простых аналоговых входов для измерения температуры — это возможное, но не лучшее решение. При необходимости контролировать пороговые значения температуры наиболее простым способом будет использование дискретных датчиков, настроенных на определенную температуру. В отличие от тепловых реле с биметаллической пластиной и гистерезисом в 7 °C и более, датчики температуры имеют гистерезис около 1 °C. Для их подключения используются обычные дискретные входы контроллера. Чтобы однозначно зафиксировать превышение порогового значения, можно добавить таймер с задержкой на включение. Если датчик будет находиться во включенном состоянии больше установленного времени, то результат запишется в активные ячейки. Пример программы, включающей вентилятор охлаждения при срабатывании дискретного температурного датчика, показан в таблице «а» на рис. 60. В момент срабатывания датчика температуры начинается отсчет времени таймеров TON в строке 2 и TOF в строке 3. Если датчик температуры остается включенным больше 5 секунд, то включается вентилятор охлаждения. Если работающий в течение 20 секунд вентилятор не смог понизить температуру, то выходной сигнал «разрешение работы» переходит в ноль. Для того чтобы вентилятор не выключался сразу же после отключения датчика температуры, а продолжал работать еще некоторое время, можно использовать триггерные ячейки. Такой вариант программы показан в таблице «б» на рис. 60. В этом случае управление вентилятором осуществляется ячейками «S» и «R». При срабатывании датчика температуры, как и в предыдущем случае, начинается отсчет времени таймеров. Через 5 секунд при включенном датчике активная триггерная ячейка «S» в строке 2 запускает вентилятор охлаждения. Если в предыдущем случае при выключении реле температуры вентилятор отключался сразу, то здесь после отключения реле вентилятор будет работать еще 15 секунд. Такая задержка будет сформирована таймером TON в строке 4 (рис. 60, «б»).
 Рис. 60. Программа управления вентилятором охлаждения:
а) управление с помощью логических ячеек; б) управление с помощью триггерных ячеек
Рис. 60. Программа управления вентилятором охлаждения:
а) управление с помощью логических ячеек; б) управление с помощью триггерных ячеек
Пример использования простых аналоговых входов для измерения температуры показан на рис. 61. Независимо от типа аналогового датчика измеряемая температура может быть преобразована в электрический сигнал, напряжение которого будет функцией от температуры, измеряемой датчиком. Напряжение с датчика температуры поступает на аналоговый вход контроллера. Аналого-цифровой преобразователь, подключенный к этому входу, преобразует измеряемое напряжение в целочисленное значение, разрядность которого будет определяться разрядностью АЦП. К примеру, если разрядность АЦП — 12 бит, то минимальное получаемое значение будет ноль, а максимальное — 4095. Опытным путем или с помощью таблиц и вычислений мы можем найти, какие значения, получаемые с АЦП, соответствуют интересующим нас температурам.
 Рис. 61. Программа контроля температуры с подключением датчиков к простым аналоговым входам
Рис. 61. Программа контроля температуры с подключением датчиков к простым аналоговым входам
Рассмотрим пример, приведенный на рис. 61, в котором при температуре выше 30,5 °C (измеряется датчиком) должен включиться вентилятор, а при температуре ниже 15,2 °C должен включиться подогрев. Опытным путем составляем таблицу зависимости цифрового значения, получаемого с АЦП, от измеряемой температуры. Пока нас интересуют два цифровых значения, которые соответствуют 15 °C и 30 °C. Допустим, это 1693 и 2091. Используя операции сравнения, включаем либо подогрев, либо вентиляцию. Программа проста, понятна и не требует специальных входов для измерения температуры. Но при эксплуатации, настройке или ремонте оборудования довольно сложно интерпретировать такие показания датчика температуры. На рис. 61 полученное с АЦП значение равно 1569. Сложно определить, какой температуре оно соответствует. Можно только сделать вывод, что температура ниже 15,2 °C. Реализовать в табличной программе алгоритм пересчета значений с АЦП в температуру в градусах Цельсия нецелесообразно, это усложнит общий алгоритм управления и сделает его трудным для понимания. Поэтому предпочтительнее использовать для измерения температуры специальные аналоговые входы. На рис. 62 показана программа, в которой сигнал с датчика температуры приходит на аналоговый вход измерения температуры. Теперь вместо значения, получаемого с АЦП, в таблице представлена текущая температура, измеряемая датчиком, в привычных градусах Цельсия. Помимо удобного представления текущей температуры, теперь довольно просто производить настройку граничных значений в градусах.
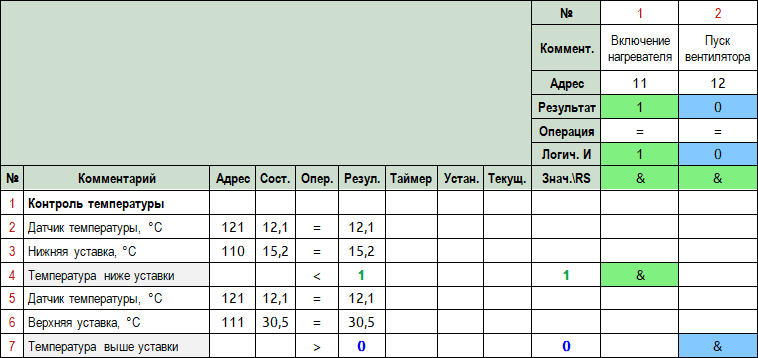 Рис. 62. Программа контроля температуры с подключением датчиков к входам измерения температуры
Рис. 62. Программа контроля температуры с подключением датчиков к входам измерения температуры
4.6. Аналоговый джойстик
Для оперативного ручного управления различными механизмами, имеющими электрические приводы, часто используют качающуюся ручку управления, при смещении которой относительно центрального положения производится какое-либо действие. Наиболее распространенное название таких ручек управления — джойстик. Для того чтобы в зависимости от величины смещения ручки изменялась, например, скорость перемещения управляемого объекта, конструкцией джойстика предусмотрено изменение электрического сигнала на его выходе пропорционально отклонению ручки от центрального положения. В настоящее время выпускаются джойстики по самым различным технологиям, но мы рассмотрим способ, при котором изменение положения ручки джойстика приводит к изменению напряжения на его выходе. Наиболее простая реализация этого способа заключается в использовании в качестве датчика отклонения переменного резистора, когда отклонение ручки джойстика будет приводить к повороту оси переменного резистора. Если на неподвижные выводы переменного резистора подать опорное напряжение, то с подвижного вывода можно снимать напряжение, которое будет пропорционально углу отклонения. Подав напряжение с выхода джойстика на аналоговый вход контроллера, можно получать цифровое значение, пропорциональное углу отклонения ручки джойстика. На рис. 63 показан пример программы управления с помощью аналогового джойстика скоростью вращения электрического двигателя, подключенного к преобразователю частоты (ПЧ). Выходное напряжение с джойстика поступает на аналоговый вход контроллера, преобразуется в цифровое значение, которое присваивается переменной с адресом 101. Так как в центральном положении джойстика переменный резистор будет установлен в среднее положение, то напряжение на входе АЦП будет равно примерно половине опорного. По мере отклонения ручки джойстика влево напряжение будет увеличиваться от половины опорного напряжения вплоть до опорного напряжения в крайнем левом положении ручки. При отклонении ручки джойстика вправо напряжение на входе АЦП станет падать и в крайнем правом положении ручки будет равно нолю. Обработка сигнала с джойстика в программе на рис. 63 разделена на несколько блоков.
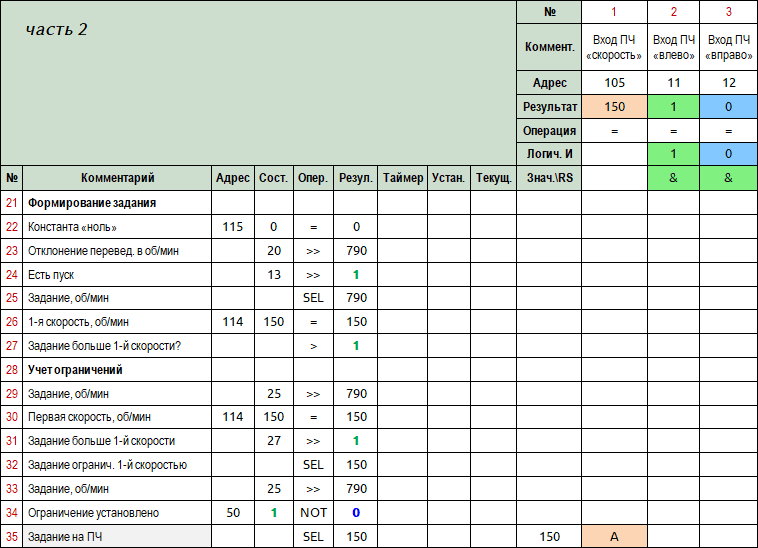
Рис. 63. Программа управления частотным приводом с помощью аналогового джойстика
Первый блок выполняет обработку сигнала от джойстика. Так как в центральном положении ручки джойстика напряжение на входе АЦП не будет точно равно половине опорного напряжения, то сначала необходимо определить, какое значение с АЦП будет соответствовать центральному положению ручки. Дополнительно нужно добавить границы возможного люфта ручки джойстика в центральном положении. Для этого двум переменным, с адресами 116 и 117, присвоим значения, от которых будем считывать отклонения ручки джойстика влево и вправо. Если рассматривать 12-битный АЦП, то максимальное получаемое от него значение будет равно 4095. Значение, получаемое от джойстика, при центральном положении ручки будет около 2047. Учитывая люфт джойстика, находим значения, от которых будем вести отсчет отклонения влево и вправо. При отклонении ручки влево значение, соответствующее отклонению влево, будет положительным, а значение, соответствующее отклонению вправо, — отрицательным. Положительный знак значения отклонения указывает, в какую сторону необходимо произвести пуск двигателя. Чтобы исключить ситуацию, когда при некорректно введенных параметрах возможно появление одновременно сигналов пуска в разные стороны, введена операция «исключающее ИЛИ». В такой ситуации активные ячейки в строке 13 блокируют пуск в любую сторону. Второй блок служит для перевода значения, получаемого с АЦП, в скорость вращения мотора в оборотах в минуту. Для этого необходимо найти коэффициент преобразования. Предположим, что максимальная скорость вращения двигателя равна 1400 об/мин, а максимальное значение отклонения джойстика в одну сторону составляет 2047. Разделив 2047 на 1400, получим 1,46. Для удобства коэффициенту преобразования присвоим значение 1,5. В третьем блоке формируется задание для преобразователя частоты. Значение задаваемой скорости появляется в строке 25 только в том случае, если была сформирована команда «пуск» в одну из сторон, иначе скорость будет равна нолю. Это сделано для того, чтобы значение скорости появлялось вместе с командой «пуск». В переменной с адресом 114 хранится значение первой скорости в оборотах в минуту. Это максимально допустимая скорость при появлении ограничений. В строке 27 проверяется, превысило ли значение скорости с джойстика величину первой скорости. Результат этой проверки будет использоваться в следующем блоке. Четвертый блок программы учитывает ограничения скорости, вызванные нажатием на кнопку «Шунт» или подходом механизма близко к конечному положению. При появлении ограничения значение скорости, подаваемой на ПЧ, не должно превышать первую скорость. Если же при включенном ограничении сигнал от джойстика превышает первую скорость, то значение скорости будет установлено равным первой скорости. В программе на рис. 63 показан случай ограничения задания скорости ПЧ. Так как значение переменной с адресом 50 равно единице, то вместо значения скорости, полученного от джойстика, — 790 об/мин — на ПЧ поступит значение первой скорости, равное 150 об/мин.
4.7. Дискретный джойстик
Чтобы сигналы от джойстика могли без специальных преобразований производить необходимые включения в электрической схеме, используются дискретные джойстики. Их можно разделить на два основных типа: одноступенчатые и многоступенчатые. В одноступенчатых джойстиках отклонение ручки приводит к замыканию одного контакта, соответствующего направлению отклонения. В многоступенчатых джойстиках по мере отклонения ручки от центрального положения последовательно замыкаются несколько контактов. Обычно дискретные промышленные джойстики имеют контакт, замыкающийся при возврате ручки в центральное положение, еще два контакта, соответствующих направлениям отклонения ручки, и несколько контактов, отвечающих за угол наклона ручки джойстика независимо от направления. Рассмотрим пример табличной программы, обрабатывающей сигналы от четырехступенчатого джойстика. Программа управления преобразователем частоты при помощи дискретного джойстика показана на рис. 64. Она состоит из трех блоков: обработки сигнала, формирования задания и учета ограничений. В блоке обработки сигналов от джойстика формируются дискретные команды пуска привода влево и вправо. Чтобы в случае поломки переключателей джойстика одновременно не появились сигналы пуска в разные стороны, введена операция «исключающее ИЛИ». При возникновении ситуации, когда входные переменные в строках 3 и 4 одновременно будут иметь значение «единица», активные ячейки в строке 5 заблокируют пуск в любую сторону. Рис. 64. Программа управления частотным приводом с помощью дискретного джойстика
Рис. 64. Программа управления частотным приводом с помощью дискретного джойстика
При формировании задания на ПЧ устанавливаются фиксированные значения скоростей для каждой ступени. Значение, соответствующее первой скорости, будет установлено при отклонении ручки джойстика в любую сторону сигналом «есть пуск». Значения, соответствующие остальным скоростям, будут выбираться по мере отклонения ручки джойстика от центрального положения. В третьем блоке учета ограничений в зависимости от значения переменной с адресом 50 выбирается скорость, подаваемая на ПЧ. При возникновении ограничений вместо сформированного задания будет выбрана первая скорость. В программе на рис. 64 показан случай ограничения скорости ПЧ переменной с адресом 50.
4.8. Таблица на нескольких страницах
Если табличная программа становится слишком большой и состоит из программных блоков, слабо связанных между собой, то такую таблицу логично было бы разделить на несколько таблиц, каждая из которых может размещаться на отдельной странице. При многостраничной организации программы возможен параллельный пересчет таблиц на отдельных страницах. Так как пересчет таблицы выполняется циклически, то выходные данные от одной страницы по мере готовности могут участвовать в расчетах на другой странице. Для каждой страницы можно выделить некоторое количество внутренних переменных, которые не являются ни входными, ни выходными. По сути, это глобальные переменные, и они будут доступны из любого места программы. Поэтому для каждой страницы самостоятельно придется определять необходимое количество переменных и следить за их использованием только в пределах той страницы, для которой они выделены. Для таблиц на отдельных страницах можно организовать набор локальных переменных. Такие переменные будут предназначены для хранения данных на конкретной странице и не будут доступны с других страниц. Чтобы не потерять прозрачность алгоритма программы, нужно ввести некоторые правила. Для предотвращения перезаписывания выходных переменных в разных местах введено ограничение: значение выходной переменной может быть записано только в одном месте. Программа проверки таблицы выдаст соответствующую ошибку при нахождении двух столбцов с одинаковыми адресами выходных переменных, независимо от того, находятся они на одной странице или на разных. Указатели на результаты операций в строках должны использоваться только в пределах одной страницы. Для передачи вычисленных значений с одной страницы на другую необходимо использовать глобальные переменные. Так как мы рассматриваем табличные программы в плане управления оборудованием, тодля того, чтобы уменьшить количество передаваемых между страницами данных, нужно на отдельной странице производить максимально полную обработку входных переменных от какого-либо механизма или процесса и передавать только окончательные результаты. Несмотря на то, что таблицы на страницах равнозначны и могут пересчитываться параллельно, стоит использовать главную страницу для сбора результатов и выдачи разрешений. Введение подобной иерархии упростит работу с программой в дальнейшем. При таком подходе любая неисправность или нештатное состояние отразится на главной странице, где будет указана страница, являющаяся источником данных о сбое.4.9. Модули-прототипы и их клоны
Одинаковые или почти одинаковые часто повторяющиеся блоки программ и наборы блоков можно сохранять как отдельные модули и использовать в дальнейшем. Для того чтобы использовать в программе проверенные и отлаженные блоки, нужно сначала сохранить табличную программу на странице как модуль-прототип, затем загрузить прототип на отдельную страницу и подключить его, изменив при необходимости адреса переменных. После сохранения модуля-клона в файл с новым именем данная копия становится самостоятельной и при необходимости может быть изменена. Например, для управления грузоподъемной техникой используются два джойстика с двумя степенями свободы каждый. Для обработки сигналов с джойстиков в таком случае потребуется четыре одинаковых табличных модуля, которые можно вынести в четыре дополнительные таблицы на отдельных страницах. Так как сигналы от джойстиков будут иметь свои, отличные друг от друга адреса, а выходные переменные будут управлять разными преобразователями частоты, то программы в таблицах будут независимы друг от друга. Большое количество переменных, использующихся в разных местах программного модуля, усложнит подключение таких модулей с помощью дополнительных страниц. Чтобы упростить подключение модулей на отдельных страницах программы, в верхних строках таблицы модуля пропишем переменные с адресами, а в теле модуля будем пользоваться указателями на строки с этими переменными. Для примера переделаем программу обработки сигнала от аналогового джойстика, чтобы глобальные переменные были только в верхних строках таблицы, а внутри программного алгоритма переменных не было. Программа обработки сигнала с аналогового джойстика, адаптированная для сохранения в качестве модуля-прототипа, показана на рис. 65. В первых восьми строках с помощью переменных определяются входные значения, необходимые для вычисления скорости и сигналов пуска влево и вправо. Далее идут четыре программных блока, аналогичные представленным в программе на рис. 63. Только теперь внутри этих блоков вместо адресов переменных введены указатели на значения переменных, прописанных в первых восьми строках.
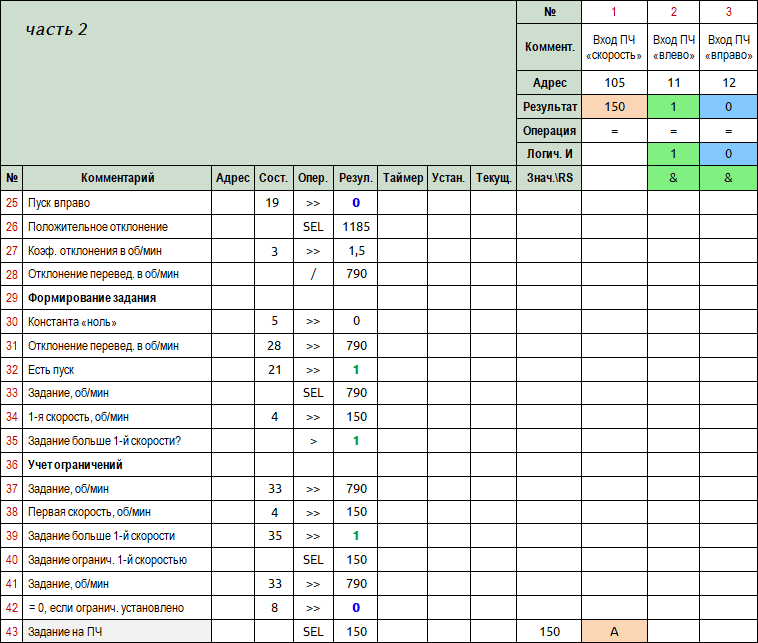 Рис. 65. Модульный вариант программы управления частотным приводом с помощью аналогового джойстика
Рис. 65. Модульный вариант программы управления частотным приводом с помощью аналогового джойстика
Для того чтобы использовать этот прототип для обработки сигнала с другого джойстика или с датчика другой степени свободы этого же джойстика, нужно загрузить данную таблицу на новую страницу, затем изменить адрес переменной в строке 2 в соответствии со схемой подключения аналогового сигнала, а в строках 3, 4, 6, 7 установить адреса переменных, в которых сохраняются данные, необходимые для обработки этого аналогового сигнала. Сохранив данную страницу, мы получаем программный модуль как клон прототипа. Применение сохраняемых модулей для обработки сигналов с джойстиков не привело к увеличению количества переменных. Большинство переменных в первых восьми строках — это параметры, подбираемые при настройке джойстика. В многостраничной программе для настройки параметров одной из степеней свободы джойстика достаточно перейти на нужную страницу и внести изменения в первые восемь строк. Так же можно добавить дополнительную страницу, на которой будут отображаться необходимые для контроля переменные. Тогда при возникновении неисправности состояние переменных, участвующих в расчете задания скорости на ПЧ, будет доступно в одном месте.
5. Простая табличная среда разработки
5.1. Общие требования к среде разработки
В табличном программировании используются довольно простые внутренние правила и небольшое количество математических и логических операций. Для того чтобы написать табличную программу, достаточно электронной таблицы и некоторого количества макросов, помогающих проверять правильность заполнения таблицы. Если программа занимает всего несколько строк и столбцов, то можно обойтись и без какой-либо среды разработки. Среда разработки табличных программ позволит не только написать большую программу и проверить ошибки, но также провести тестирование программы при различных входных параметрах. Так как программа пересчета таблицы имеет несложный алгоритм и может быть реализована множеством способов, то ее можно встроить в среду разработки. Тогда можно запускать цикл пересчета таблицы в любой момент написания программы и проверять правильность алгоритма. Попробуем определиться с основными требованиями к среде разработки табличных программ. Выделим самые важные моменты. Во-первых, внешний вид таблицы должен быть привычным для пользователей электронных таблиц. Ввод данных должен производиться прямо в ячейки таблицы, аналогично вводу в распространенные электронные таблицы. В зависимости от типа переменных в ячейках могут появляться соответствующие подсказки. Во-вторых, однократный пересчет таблицы может быть произведен в любой момент написания программы, по желанию программиста. Написание табличной программы может идти одновременно с отладкой и тестированием в режиме эмуляции. Подставляя входные данные и запуская однократный проход таблицы, можно получать промежуточные результаты и в случае их несовпадения с ожидаемыми значениями корректировать алгоритм. В-третьих, среда разработки должна автоматически контролировать нарушение правил написания табличных программ. Одно из ограничений — присвоение выходной переменной значения в разных местах. Чтобы не порождать ошибки, связанные с циклическим пересчетом таблицы, когда выходная переменная по мере пересчета таблицы может принимать разные значения в разных столбцах, присвоение переменной результата операции по столбцу должно происходить однократно. А при многостраничном программировании недопустимо применение указателей на результаты в строках разных страниц. Также недопустимо присвоение битовой переменной аналогового значения или аналоговой переменной — битового. Конечно, приветствуются различные сервисные функции и удобства, если их применение не усложнит обучение табличному программированию и не поднимет квалификационный порог для того, чтобы начать программировать. Желательно, чтобы среда разработки табличных программ была простой и интуитивно понятной.5.2. Почему используется браузер?
Для разработки принципов табличного программирования была написана программа, в которой реализованы самые основные требования к среде разработки табличных программ. Уже на начальном этапе стало понятно, что табличный контроллер должен иметь стандартный веб-интерфейс и показывать свое состояние в режиме онлайн в браузере любого компьютера, планшета или смартфона. Для этого в контроллер должна быть загружена среда исполнения, которая, помимо пересчета таблицы, будет выводить текущее состояние таблицы на клиентское устройство. Предполагалось, что по мере написания программы в среде разработки будет производиться отладка с помощью однократных пересчетов таблицы и отображения результатов. Внешний вид табличной программы в среде разработки и на экране клиентского устройства, подключенного к контроллеру, в основном должен совпадать, за исключением верхнего ряда сервисных кнопок, необходимых при редактировании и отладке. Чтобы не было возможности внесения изменений в программу с клиентского устройства, в таблице на странице клиента нет кнопок для редактирования. Таким образом, изменить программу можно только в среде разработки. Взаимодействие контроллера с установленной на нем средой исполнения табличной программы с клиентским устройством производится при помощи протокола передачи гипертекста HTTP. На контроллере запускается серверная часть задачи отображения состояния табличной программы, а на компьютере или другом устройстве — клиентская. Изначально рассматривалось условие, что клиентская часть не будет требовать установки каких-либо дополнительных программ на клиентское устройство и должна быть максимально стандартной. К контроллеру может быть подключено любое вычислительное устройство с установленным на нем современным браузером. Если клиентское устройство и контроллер находятся в одной подсети, то для отображения состояния табличной программы достаточно только ввести IP-адрес контроллера в строку браузера. В зависимости от реализации серверной части контроллера будет определяться количество одновременно подключенных клиентов. Программа, в которой реализована среда разработки, написана как веб-страница и представляет собой один HTML-файл, в котором содержатся стили CSS, HTML и JavaScript. Это позволило одновременно разработать редактор табличных программ и часть программы контроллера, отвечающую за вывод таблицы на клиентское устройство, так как отображение табличной программы в обоих случаях предполагалось в виде HTML-страницы. Таким образом, открытый текст среды разработки табличных программ может стать неплохим подспорьем в написании среды исполнения табличных программ. Часть такой программы будет содержать ответ в виде HTML-страницы, загружаемой на устройство клиента, с помощью которой браузер в одном из окон сформирует таблицу с заданными параметрами. Готовые настройки стилей и скрипты, применяющиеся в среде разработки, можно использовать при написании среды исполнения табличной программы для выбранного контроллера.5.3. Среда разработки программ, организованных в виде таблиц[3]
Так как программа, в которой реализована среда разработки, представляет собой HTML-файл, то для редактирования и отладки табличной программы достаточно открыть этот файл в браузере. На рис. 66 показана страница браузера сразу же после открытия файла программы. В верхнем левом углу экрана находятся шесть кнопок управления. Разберем их назначение слева направо. Рис. 66. Кнопки панели инструментов:
1) кнопка загрузки табличного файла на страницу; 2) кнопка выгрузки (сохранения) таблицы в файл на диске; 3) кнопка проверки таблицы на ошибки; 4) кнопка однократного пересчета таблицы; 5) кнопка сокрытия столбцов таймера; 6) кнопка настроек таблицы
Рис. 66. Кнопки панели инструментов:
1) кнопка загрузки табличного файла на страницу; 2) кнопка выгрузки (сохранения) таблицы в файл на диске; 3) кнопка проверки таблицы на ошибки; 4) кнопка однократного пересчета таблицы; 5) кнопка сокрытия столбцов таймера; 6) кнопка настроек таблицы
Первая кнопка позволяет загрузить файл с таблицей для редактирования. Пиктограмма на кнопке достаточно стандартная — папка с документами. При нажатии на эту кнопку вызывается окно загрузки файла на страницу редактирования. Вторая кнопка служит для сохранения таблицы, отображаемой на странице, в файл на диске. Пиктограмма на этой кнопке также стандартна — дискета. Так как браузеры не могут сохранять файлы, как обычные приложения, то для них предусмотрена функция «download». Каждый раз при нажатии на эту кнопку файл будет сохраняться на диске как отдельная копия в папке, предназначенной для загрузки файлов. В операционной системе Windows это папка «Загрузки». С помощью третьей кнопки производится проверка таблицы на ошибки. Пиктограмма на этой кнопке — измерительный прибор штангенциркуль. При нажатии на нее начинается проверка таблицы на ошибки и несоответствия. Если проверка пройдет успешно, то под кнопками появится надпись об окончании проверки. В случае обнаружения ошибок будет выведено сообщение о первой встретившейся ошибке и ее код. Нажатие на четвертую кнопку произведет однократный пересчет таблицы и выведет в ячейки результаты вычислений. Проверять работу табличной программы таким способом можно в любой момент после ввода строки, столбца или блока строк. Изменяя состояния входных переменных в столбце «Сост.» и производя пересчет таблицы, можно проверить работу программы или отдельного блока. Пятая кнопка позволяет скрывать три столбца таймера: «Таймер», «Устан.», «Текущ.», при этом освобождается пространство на экране для вывода дополнительных столбцов. Пиктограмма на этой кнопке представляет собой горизонтальные стрелки с ограничителями. Ситуация, когда нужно скрыть столбцы таймера, возникает при недостаточном разрешении экрана или необходимости просмотра большего количества столбцов одновременно. Повторное нажатие на эту кнопку восстановит обычную ширину столбцов таймера. Настройку параметров таблицы можно произвести, нажав шестую кнопку. Пиктограмма на этой кнопке — несколько параллельных горизонтальных полосок, напоминающих по виду список. Нажатие на эту кнопку откроет меню настройки параметров таблицы. В первых версиях программы среды разработки устанавливались только диапазоны адресов для битовых и аналоговых переменных. При наведении указателя на любую из кнопок всплывает текстовая подсказка с описанием назначения кнопки. Для добавления или удаления строк нужно навести указатель на номер строки и кликнуть по нему два раза, затем в открывшемся списке меню выбрать необходимое действие. Аналогично добавляются и удаляются столбцы. Пример меню добавления строк показан на рис. 67.
 Рис. 67. Меню добавления и удаления строк
Рис. 67. Меню добавления и удаления строк
Ввод текста в поля «Комментарий» и «Адрес» производится обычным способом. Достаточно навести указатель на выбранное поле и кликнуть один раз. Появится курсор, и можно будет производить ввод. Если адрес переменной или операция введены не будут, то строка станет считаться комментарием. Текст комментариев выделяется жирным шрифтом. Благодаря этой функции удобно разделять группы строк на блоки. В зависимости от значения в поле «Адрес» будет определен список предлагаемых операций. Если адрес соответствует битовой переменной, то в меню будут две операции: «=» и «NOT». Для аналоговой переменной будет доступна одна операция — «=». При пустом поле «Адрес» в списке меню будут все доступные операции (рис. 68).
 Рис. 68. Меню выбора операции
Рис. 68. Меню выбора операции
Если имеется результат операции в строке и введен адрес выходной переменной в столбце, то можно редактировать активную ячейку на пересечении строки и столбца (рис. 69). В зависимости от типа входной переменной будут предложены варианты активных ячеек. Для битового результата по строке — «&», «R», «S». Для аналогового результата — только «А».
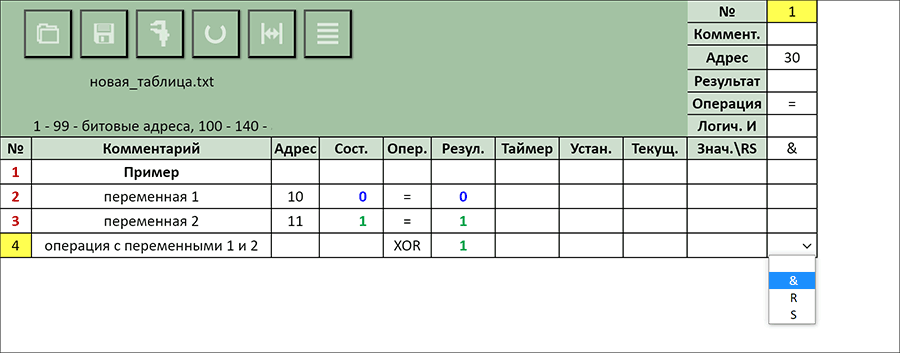 Рис. 69. Меню выбора активной ячейки
Рис. 69. Меню выбора активной ячейки
Если результат операции в строке битовый, то при необходимости можно установить в строке таймер. Тогда при изменении результата операции в строке активные ячейки строки примут новое состояние в зависимости от типа таймера и времени задержки. В первой версии программы среды разработки нет эмуляции таймеров. Так как пересчет таблицы производится ручным нажатием на четвертую кнопку, а не автоматически, при этом между пересчетами может пройти достаточно большое время относительно установленного времени таймера, то возможно появление логических ошибок, когда таймер установил значение, а цикл пересчета еще не выполнялся. Для того чтобы не усложнять проверку программы в режиме эмуляции, работа таймеров не производится. Введенные в программу тип таймера и время задержки будут сохранены в табличном файле. Для установки таймера в строке необходимо кликнуть по полю «Таймер» два раза и в открывшемся списке меню выбрать тип таймера, а в поле «Устан.» ввести время задержки в миллисекундах. Пример заполнения поля «Таймер» показан на рис. 70.
 Рис. 70. Установка таймера
Рис. 70. Установка таймера
Последние комментарии
4 часов 10 минут назад
4 часов 16 минут назад
4 часов 20 минут назад
4 часов 20 минут назад
4 часов 26 минут назад
4 часов 43 минут назад